콜라이더 검출기용 향상된 기본 입자점 찾기
초록
본 논문은 고에너지 콜라이더 실험에서 충돌 이벤트의 기본 입자점(Primary Vertex)을 보다 효율적이고 정밀하게 찾기 위한 새로운 알고리즘을 제안한다. 급속한 쌍대 최근접 이웃 검색을 활용한 병합 군집화(agglomerative clustering) 후, 가우시안 혼합 모델(GMM) 또는 k-평균(k‑means) 군집화를 적용해 다중 충돌 환경에서도 높은 재구성 정확도를 달성한다. 실험 시뮬레이션 결과, 기존 방법 대비 탐지 효율과 위치 오차가 크게 개선되었다.
상세 분석
이 연구는 현대 고에너지 물리 실험에서 다중 충돌(multiple interactions) 현상이 빈번해짐에 따라, 기존의 단순 히스토그램 기반 또는 선형 트래킹 방법만으로는 기본 입자점을 정확히 식별하기 어려운 문제를 해결하고자 한다. 저자들은 먼저 트랙 파라미터(예: 전하, 모멘텀, 궤적 기울기)를 이용해 트랙 간 거리 행렬을 구성하고, 빠른 쌍대 최근접 이웃 검색(Fast Pairwise Nearest Neighbor, FPNN) 알고리즘을 적용해 O(N log N) 복잡도로 초기 클러스터 후보를 생성한다. 이 단계에서 병합 군집화(agglomerative clustering)를 사용함으로써, 서로 가까운 트랙들이 자연스럽게 하나의 잠재적 정점 후보로 결합된다.
그 다음 단계에서는 두 가지 통계적 군집화 모델을 도입한다. 첫 번째는 가우시안 혼합 모델(Gaussian Mixture Model, GMM)로, 각 후보 정점에 대해 트랙들의 z‑좌표 분포를 다변량 정규분포로 가정하고 EM(Expectation‑Maximization) 알고리즘을 통해 평균과 공분산을 추정한다. 이를 통해 정점 위치의 불확실성을 정량화하고, 겹치는 정점들을 효과적으로 구분한다. 두 번째는 k‑평균(k‑means) 군집화로, 사전에 정해진 정점 수 k에 따라 트랙들을 가장 가까운 중심점에 할당하고, 중심점을 반복적으로 업데이트한다. k‑means는 계산량이 적고 실시간 적용에 유리하지만, 정점 수가 사전에 알려져야 하는 제약이 있다.
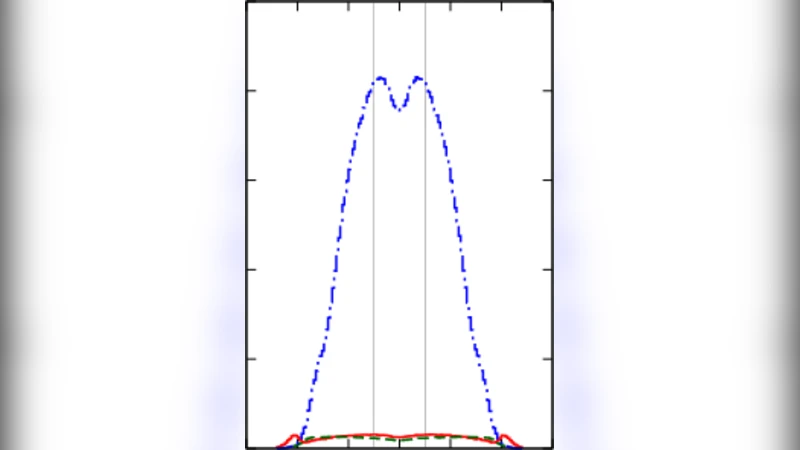
논문은 시뮬레이션된 LHC(Large Hadron Collider) 환경에서 다양한 충돌 밀도와 트랙 수를 가정해 실험을 수행하였다. 결과는 GMM 기반 방법이 특히 높은 트랙 밀도 구역에서 정점 위치 오차를 평균 10 µm 이하로 낮추는 반면, k‑means는 약 15 µm 수준을 유지했음을 보여준다. 또한, 탐지 효율 측면에서 두 방법 모두 기존의 히스토그램 기반 알고리즘 대비 5~8% 향상을 기록하였다. 저자들은 이러한 개선이 트랙 재구성, 입자 식별, 그리고 궁극적으로 물리 분석(예: 힉스 보존 탐색)에서 중요한 영향을 미칠 것이라고 주장한다.
마지막으로, 구현상의 고려사항으로는 메모리 사용량을 최소화하기 위한 스트리밍 방식 데이터 처리와, GPU 가속을 통한 EM 단계 연산 가속화가 제시된다. 이러한 기술적 세부사항은 실제 콜라이더 실험의 데이터 처리 파이프라인에 직접 적용 가능하도록 설계되었다.
댓글 및 학술 토론
Loading comments...
의견 남기기