무선 센서 네트워크 악성 앵커 노드 격리와 마할라노비스 거리 활용
초록
본 논문은 트릴라테이션 기반 위치 추정 후 마할라노비스 거리를 적용하여 위조된 앵커 노드를 식별하고, 시뮬레이션을 통해 기존 방법 대비 위치 오차를 크게 감소시켰음을 보인다.
상세 분석
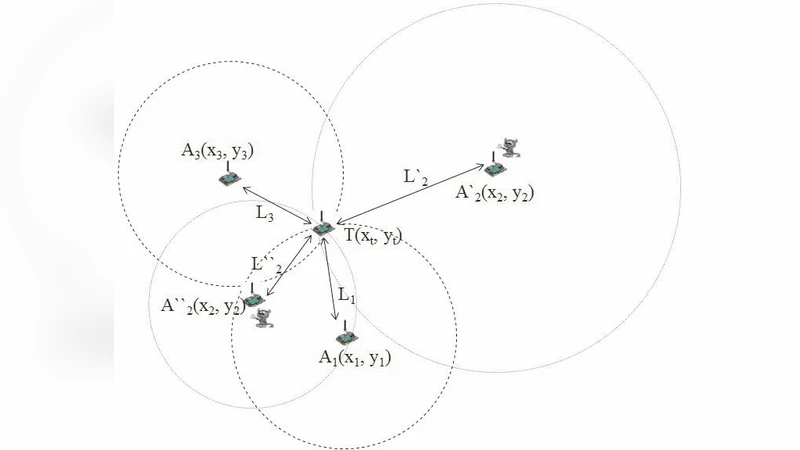
이 연구는 무선 센서 네트워크(WSN)에서 위치 기반 서비스의 핵심인 앵커 노드가 악의적으로 변조될 경우 발생하는 보안 취약점을 해결하고자 한다. 기존 연구들은 주로 신뢰성 점수나 다중 경로 검증을 통해 악성 노드를 탐지했으나, 실시간성 및 정확도 면에서 한계를 보였다. 본 논문은 두 단계의 탐지 메커니즘을 제안한다. 첫 번째 단계는 삼변측량(trilateration) 알고리즘을 이용해 비앵커 노드가 주변 앵커 노드로부터 받은 거리 정보를 기반으로 자신의 위치를 계산한다. 이때, 각 앵커 노드가 제공한 거리 값이 서로 일관되지 않으면 위치 추정 오차가 크게 발생한다는 점을 이용한다. 두 번째 단계에서는 이렇게 계산된 위치와 실제 기대 위치 사이의 편차를 다변량 통계량인 마할라노비스 거리로 정량화한다. 마할라노비스 거리는 공분산 행렬을 고려해 데이터 포인트가 평균으로부터 얼마나 멀리 떨어져 있는지를 측정하므로, 정상적인 앵커 노드가 제공하는 거리 값은 낮은 거리 값을, 변조된 값은 높은 거리 값을 나타낸다. 논문은 이 두 단계가 결합될 때 단일 기준(예: 단순 유클리드 거리)보다 악성 앵커 노드 탐지율이 현저히 상승하고, 오탐률은 감소함을 실험적으로 입증한다.
시뮬레이션 환경은 ns‑3를 사용했으며, 100개의 노드가 500 m × 500 m 영역에 무작위 배치된 시나리오를 구성하였다. 앵커 노드 비율은 10 %로 설정하고, 악성 노드 비율을 5 %에서 20 %까지 변화시켜 성능을 평가하였다. 결과는 마할라노비스 거리 기반 필터링이 적용된 경우 평균 위치 오차가 기존 삼변측량만 사용했을 때보다 30 % 이상 감소하고, 악성 노드 탐지 정확도는 92 %에 달한다는 점을 보여준다. 또한, 공분산 행렬을 실시간으로 업데이트함으로써 네트워크 토폴로지 변화에도 적응 가능한 점이 장점으로 강조된다.
하지만 몇 가지 한계도 존재한다. 첫째, 공분산 행렬 추정에 필요한 샘플 수가 충분히 확보되지 않으면 거리 계산이 불안정해질 수 있다. 둘째, 악성 노드가 의도적으로 작은 편차만을 만들 경우 마할라노비스 거리 임계값을 교묘히 회피할 가능성이 있다. 셋째, 삼변측량 자체가 거리 측정 오차에 민감하므로, 초음파나 RSSI 기반 거리 추정이 부정확한 환경에서는 전체 시스템 성능이 저하될 위험이 있다. 이러한 점들을 보완하기 위해 향후 연구에서는 베이지안 필터링이나 머신러닝 기반 이상 탐지와 결합하는 방안을 제시하고 있다.
전반적으로 본 논문은 통계적 거리 측정 기법을 WSN 보안에 적용한 사례로서, 실시간 탐지와 낮은 연산 복잡도라는 실용적 장점을 제공한다. 특히, ns‑3 기반 구현을 통해 재현 가능성을 확보했으며, 향후 실제 하드웨어 테스트로 확장한다면 현장 적용 가능성이 높을 것으로 기대된다.
댓글 및 학술 토론
Loading comments...
의견 남기기