ROSS 물리 구조 중심 새로운 지식 표현 체계
초록
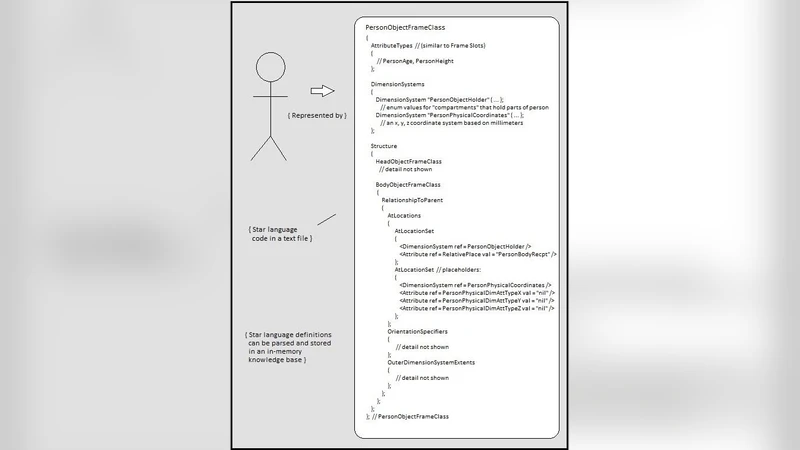
ROSS는 물리적 구조와 관계를 핵심으로 하는 지식 표현 방법으로, 온톨로지 정의를 위한 “Star” 언어와 상황을 기술하는 “인스턴스 모델”을 제시한다. 논문은 ROSS의 철학적 배경과 기존 KR 방식의 한계를 짚으며, 물리적 실체와 그 구성요소를 명시적으로 모델링함으로써 의미 해석과 추론의 정확성을 높이는 목표를 설명한다.
상세 분석
ROSS는 Representation, Ontology, Structure, Star의 약어로, 물리적 실재와 그 구조적 관계를 중심에 두는 새로운 지식 표현 프레임워크이다. 기존의 프레임 기반, 시맨틱 네트워크, 온톨로지 언어(Ontology Language) 등은 주로 개념 간의 논리적 관계(상속, 부분-전체, 속성 등)에 초점을 맞추었지만, 물리적 세계의 구체적 구성요소와 그 배치, 계층적 구조를 충분히 표현하지 못한다는 비판을 받는다. ROSS는 이러한 한계를 보완하기 위해 두 가지 핵심 구성요소를 도입한다. 첫째, “Star”라는 선언적 언어를 통해 클래스(개념)를 정의한다. Star는 클래스의 물리적 속성(크기, 형태, 재질 등)과 구조적 관계(포함, 연결, 위치)를 명시적으로 기술하도록 설계되었으며, 속성값은 정량적(숫자) 혹은 질적(열거형) 형태를 모두 허용한다. 둘째, “인스턴스 모델”은 실제 상황을 기술하는 구체적 데이터 구조이다. 인스턴스 모델은 Star로 정의된 클래스의 구체적 인스턴스를 배치하고, 시간적·공간적 관계를 연결함으로써 자연어 의미 해석, 시뮬레이션, 로봇 제어 등 다양한 응용에 활용될 수 있다. 논문은 ROSS가 “물리적 구조 중심”이라는 철학적 입장을 취함으로써 의미론적 모호성을 감소시키고, 추론 엔진이 구조적 제약을 직접 활용해 보다 정확한 결론을 도출하도록 돕는다고 주장한다. 또한, Star 언어는 메타모델 수준에서 온톨로지와 스키마를 통합하는 역할을 수행해, 기존 OWL·RDF 기반 시스템과의 상호운용성을 확보한다는 점도 강조한다. 이러한 설계는 특히 복합 객체(예: 자동차, 인간 신체)나 다중 모달 데이터(영상·음성·텍스트)의 통합 표현에 강점을 보이며, 기존 KR 방식이 갖는 “개념 중심” 한계를 넘어서는 새로운 패러다임을 제시한다.