로봇 시스템을 위한 요구사항 기반 컴포넌트 행동 모델링 언어
초록
본 논문은 로봇 애플리케이션의 복잡성을 관리하기 위해, 컴포넌트‑커넥터 기반 아키텍처 설명 언어인 MontiArc에 I/O! 자동자를 도입한 요구사항 모델링 기법을 제안한다. 요구사항 수준에서 컴포넌트의 입력·출력 인터페이스와 상태 전이를 명시함으로써 초기 시뮬레이션, 형식적 검증, 자동 코드 생성이 가능해진다. Lego NXT 로봇을 대상으로 한 사례 연구를 통해 접근법의 실효성을 입증한다.
상세 분석
이 연구는 사이버‑물리 로봇 시스템의 설계·구현 단계에서 요구사항과 구현 사이의 간극을 메우는 방법론을 제시한다. 기존 MontiArc는 컴포넌트와 커넥터를 통해 시스템 구조를 선언적으로 기술하지만, 컴포넌트 내부의 동작 로직을 표현하는 메커니즘이 부족했다. 이를 보완하기 위해 저자들은 I/O! 자동자를 도입한다. I/O! 자동자는 전통적인 I/O 자동자의 확장으로, 입력, 출력, 내부(τ) 전이를 모두 명시적으로 모델링할 수 있어 상태 기반 요구사항을 자연스럽게 기술한다. 특히 Martin Glinz가 제안한 Statecharts for Requirements Modeling을 계승하면서, 이벤트‑드리븐 전이와 가드·액션을 간결한 문법으로 표현한다.
구문적으로는 MontiArc의 컴포넌트 정의에 automaton 블록을 추가하고, input, output, state, transition 키워드로 I/O! 자동자를 기술한다. 의미론적으로는 각 자동자를 독립적인 LTS(라벨 전이 시스템)로 변환한 뒤, MontiArc의 연결 관계와 합성하여 전체 시스템의 전이 시스템을 구성한다. 이 과정은 자동화된 시뮬레이터와 모델 체커에 바로 입력될 수 있어, 요구사항 단계에서 데드락, 안전성, 실시간 제약 등을 검증한다.
툴 체인 측면에서 저자들은 MontiCore 기반의 DSL 파서와 코드 생성기를 구현했으며, 시뮬레이션은 Eclipse 기반 시각화 플러그인으로 제공한다. 코드 생성은 자동자 정의를 Java 혹은 C++ 로 변환하고, MontiArc 컴포넌트 프레임워크와 연동해 실행 가능한 로봇 소프트웨어를 생산한다.
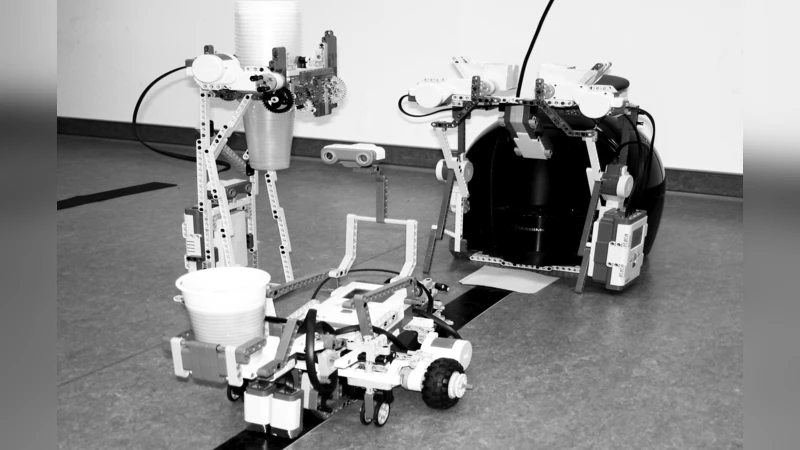
사례 연구에서는 Lego NXT 로봇의 라인 트레이싱 및 장애물 회피 행동을 요구사항 자동자로 모델링하고, 시뮬레이션을 통해 로직 오류를 사전에 발견하였다. 이후 자동 생성된 코드를 NXT에 배포했을 때, 실제 로봇이 기대한 대로 움직였으며, 요구사항과 구현 사이의 일관성이 유지됨을 확인했다.
이 접근법의 주요 장점은 (1) 요구사항을 구조적·형식적으로 명세함으로써 초기 단계에서 검증이 가능하고, (2) 자동화된 코드 생성으로 구현 비용을 절감하며, (3) 기존 MontiArc 기반 아키텍처와 무리 없이 통합된다는 점이다. 반면, I/O! 자동자의 표현력이 복잡한 연산·시간 제약을 완전히 포괄하지 못한다는 제한점과, 대규모 시스템에서 자동자 간 상호작용을 관리하기 위한 추가 메커니즘이 필요하다는 점이 향후 연구 과제로 남는다.
댓글 및 학술 토론
Loading comments...
의견 남기기