비유클리드 기하학을 이용한 객체 추적 그라스만 접근법
본 논문은 객체 외관을 affine 서브스페이스로 모델링하고, Grassmann 다양체상의 기하학적 거리와 Mahalanobis 거리를 결합한 새로운 서브스페이스‑대‑서브스페이스 거리 측정법을 제안한다. 파티클 필터 기반의 마코프 체인 몬테카를로 프레임워크에 통합해 실시간 추적을 수행하며, 다중 모델(백) 전략을 통해 급격한 외관 변화와 부분 가림에 강인함을 확보한다. 실험 결과는 기존 최첨단 방법들보다 우수한 정확도를 보여준다.
저자: Sareh Shirazi, Mehrtash T. Har, i
본 논문은 비디오 스트림에서 객체를 추적하기 위한 외관 모델링과 거리 측정 방법을 새롭게 제안한다. 기존의 단일 이미지 기반 트래커는 급격한 외관 변화, 가림, 조명 변동 등에 취약한데, 저자는 이를 해결하기 위해 affine 서브스페이스(원점이 자유로운 선형 서브스페이스)를 사용한다. affine 서브스페이스는 원점 μ와 기저 행렬 U 로 구성되며, 각 후보 영역(파티클)의 외관은 최근 P 프레임의 이미지 집합을 평균하여 μ를, SVD를 통해 상위 n개의 특이벡터를 추출해 U를 만든다. 이렇게 하면 후보마다 고유한 서브스페이스가 생성되어, 단순히 점‑대‑서브스페이스 거리 대신 서브스페이스‑대‑서브스페이스 거리를 계산할 수 있다.
거리 측정식은 두 부분으로 구성된다. 첫 번째는 Grassmann 다양체 G_{D,n} 위의 지오데식 거리 dist_G(U_i, U_j) 로, 두 서브스페이스 사이의 주각(θ) 을 SVD로 구한 뒤 ‖θ‖_2 로 계산한다. 두 번째는 원점 차이 μ_i−μ_j 에 대한 Mahalanobis 거리이며, 공분산 행렬 M = 2I_D − U_iU_i^T − U_jU_j^T 로 정의된다. 두 거리의 가중합에 α 를 곱해 최종 거리 dist(A_i, A_j) 를 얻고, 이를 정규화된 가우시안 likelihood 로 변환한다.
트래킹 프레임워크는 파티클 필터 기반의 마코프 체인 몬테카를로(MCMC) 방법을 사용한다. Condensation 알고리즘을 통해 X‑Y‑S(위치·크기) 공간을 확률적으로 샘플링하고, 각 파티클은 이전 프레임의 가중치에 비례해 재샘플링된 뒤 가우시안 잡음(브라운 운동)으로 퍼짐을 모델링한다. 이렇게 제한된 후보 집합에 대해 위에서 정의한 서브스페이스 거리 기반 likelihood 를 계산하고, 백(M) 안의 모든 모델에 대해 합산(rule‑sum)하여 최종 점수를 산출한다. 가장 높은 점수를 받은 파티클이 현재 프레임의 객체 위치가 된다.
백은 k 개의 affine 서브스페이스를 저장하는 모델 풀이다. 일정 프레임 간격(W)마다 가장 오래된 모델을 최신 모델로 교체함으로써, 부분 가림이나 급격한 외형 변화가 발생해도 과거에 학습된 다양한 외관 정보를 보존한다. 실험에서는 k=10, W=5 로 설정했으며, 백을 사용함으로써 트래커가 가림 후에도 빠르게 복구되는 효과를 확인했다.
복잡도 측면에서 모델 생성은 O(D^3 + 2Dn) 연산, 두 서브스페이스 간 지오데식 거리 계산은 O((D+1)n^2 + n^3) 연산, 백의 모든 모델과 비교하는 비용은 O((2n+3)D^2 + (n^2+1)D + n^3 + n^2) 로 분석된다. 실시간 적용을 위해 이미지 영역을 32×32 로 축소하고, n=3 로 고정했으며, D는 1024 이하로 제한했다.
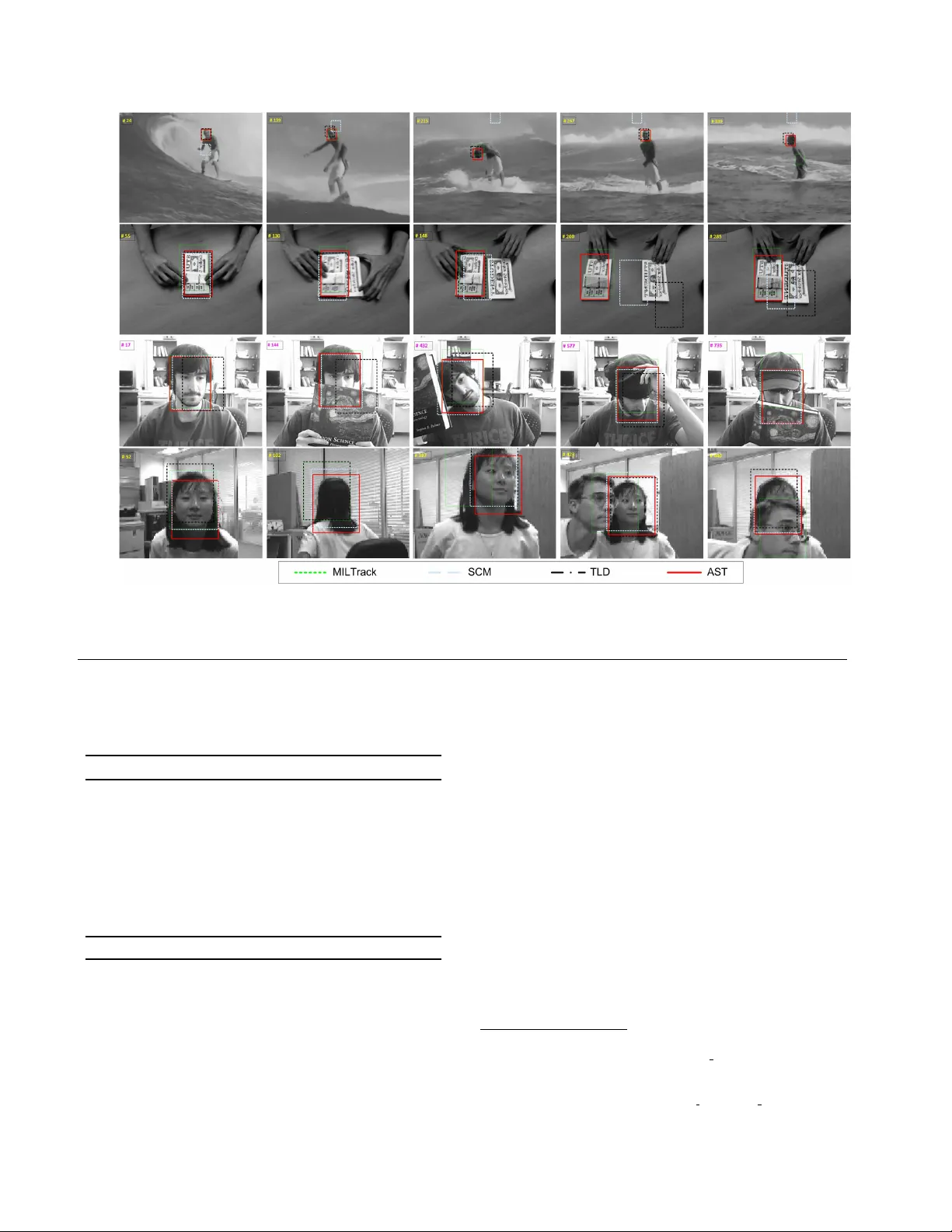
실험은 8개의 공개 비디오(얼굴 및 일반 객체)에서 수행되었다. 각 비디오는 8비트 그레이스케일이며 320×240 크기로 리사이즈되었다. 원시 픽셀값을 그대로 사용했으며, 후보 이미지 영역도 동일하게 32×32 로 변환했다. 제안된 AST(affine subspace tracker)는 Occluded Face, Girl, Tiger1, Tiger2, Coke Can, Surfer, Coupon Book 등 다양한 시나리오에서 기존 TLD, MILtrack 등과 비교해 평균 성공률과 정확도가 현저히 높았다. 특히 조명 변화와 부분 가림이 심한 시퀀스에서 백을 활용한 모델 다변성이 큰 효과를 보였으며, 서브스페이스‑대‑서브스페이스 거리 측정이 점‑대‑서브스페이스 거리보다 더 견고한 매칭을 제공함을 확인했다.
결론적으로, affine 서브스페이스와 Grassmann 기하학을 결합한 새로운 거리 측정법을 제시하고, 파티클 필터와 백 기반 모델 관리 전략을 통해 실시간 객체 추적에 적용함으로써 기존 방법 대비 견고함과 정확성을 동시에 향상시켰다. 이 접근법은 향후 복잡한 동적 환경에서의 객체 추적 및 다중 객체 추적에도 확장 가능성이 있다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기