기술 잡음이 오히려 신호대잡음비를 높인다 – 허수 약한값 이용법
초록
본 논문은 측정 장치(미터)의 초기 상태가 매 실험마다 무작위로 변동하는 경우, 허수 약한값을 이용하면 이러한 기술적 잡음이 신호대잡음비(SNR)를 감소시키지 않고 오히려 향상시킬 수 있음을 이론적·수치적으로 입증한다. 이를 통해 최근 실험에서 관찰된 잡음 억제 현상의 원인을 설명하고, 양자 측정학에서 엔탱글먼트 없이도 정밀도를 높일 수 있는 새로운 전략을 제시한다.
상세 분석
이 논문은 AAV(Aharonov‑Albert‑Vaidman) 효과를 기반으로 한 약한 측정(weak measurement)의 두 가지 주요 변형, 즉 실수 약한값과 허수 약한값을 비교한다. 전통적인 약한 측정에서는 시스템과 미터가 약하게 결합된 후 사후 선택(post‑selection)을 통해 관측값을 증폭한다. 이때 신호는 미터 변수 Q(상호작용 연산자 P와 공역변수) 혹은 P 자체에 나타나며, 각각 실수와 허수 약한값에 대응한다.
논문은 먼저 이상적인 경우, 즉 미터가 완벽한 가우시안 상태(Δ)로 초기화된 상황에서 SNR을 계산한다. Q를 측정하면 SNR∝√N·k·Re C_w·Δ, P를 측정하면 SNR∝√N·k·Im C_w·Δ⁻¹이다. 여기서 k는 상호작용 강도, C_w는 약한값이다. 두 경우 모두 약한값이 실수·허수이든 동일한 스케일을 보이지만, 실제 실험에서는 기술적 잡음이 존재한다.
핵심은 미터 초기 상태가 Q축으로 이동(Q₀)하거나 P축으로 이동(P₀)하는 ‘기술 잡음’이다. Q₀가 백색 잡음(평균 0, 분산 Δ_Q²)으로 무작위 변동하면 Q 측정의 분산이 Δ²+Δ_Q²로 늘어나 SNR이 감소한다. 반면 P₀가 동일한 방식으로 변동해도, 허수 약한값을 이용한 P 측정에서는 사후 선택 확률이 P₀에 의존한다. 사후 선택 후 평균을 취하면 평균 P 이동량이 k·Im C_w·(Δ⁻²+Δ_p²)⁻¹ 형태로 나타나며, 분산은 Δ⁻²+Δ_p²가 된다. 결과적으로 SNR∝√N·k·Im C_w·√(Δ⁻²+Δ_p²)⁻¹ 로, Δ_p가 클수록 오히려 SNR이 증가한다. 즉, 허수 약한값 측정은 P축 잡음에 대해 ‘노이즈 억제’ 효과를 보이며, 이는 실험적으로 관측된 기술 잡음 감소 현상을 설명한다.
또한 AAV 효과가 유효하려면 |k C_w|²·⟨P²⟩≪1이어야 한다. Q축 잡음이 있더라도 ⟨P²⟩는 변하지 않으므로 조건은 동일하지만, P축 잡음이 클 경우 ⟨P²⟩가 증가해 조건이 더 엄격해진다. 따라서 허수 약한값을 이용한 경우에도 충분히 작은 k와 적절한 사후 선택 확률(p≈|⟨Φ|Ψ⟩|²)이 필요하다.
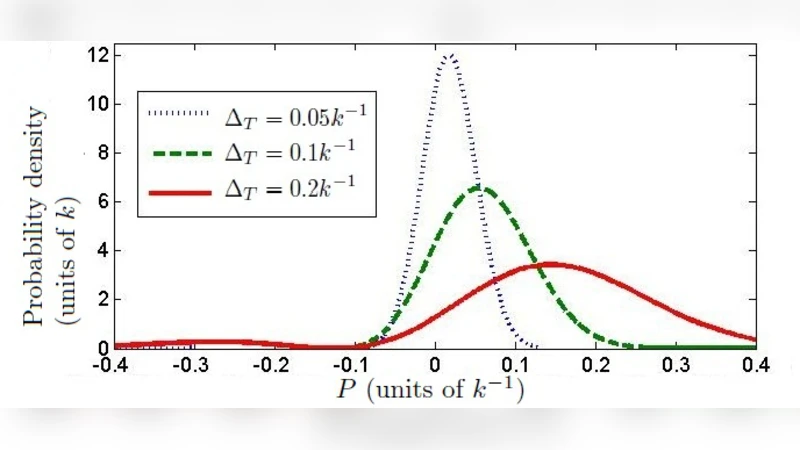
수치 시뮬레이션에서는 두 수준 시스템(큐비트)과 가우시안 미터를 사용해 위 식들을 검증하였다. 결과는 k·Δ_T<1(Δ_T=Δ⁻²+Δ_p²) 구간에서 분포가 거의 가우시안이며 중심이 k·Im C_w·Δ_T⁻¹ 만큼 이동하고, SNR이 선형적으로 증가함을 보여준다. k·Δ_T≈1 근처에서 최적 SNR이 나타나고, 그 이상에서는 AAV 효과가 무너지면서 SNR이 감소한다.
마지막으로, 기존 실험(Spin Hall 효과 측정, Sagnac 인터페로미터)과 비교해 보면, 두 실험 모두 허수 약한값을 이용해 P축(전이 모멘텀 또는 위치) 변화를 측정했으며, 결과적으로 측정 폭(Δ_T)의 제곱이 신호 크기에 비례했다는 점에서 본 이론과 일치한다. 논문은 또한 엔탱글먼트 없이도 Cramér‑Rao 한계를 향상시킬 수 있음을 강조한다. 기술 잡음을 ‘자원’으로 활용함으로써 저비용 광원(백색광)이나 상온·진공이 아닌 환경에서도 높은 정밀도를 달성할 수 있는 실용적 가능성을 제시한다.
댓글 및 학술 토론
Loading comments...
의견 남기기