웨어러블 카메라 영상으로 치매 환자 일상 행동 인덱싱
초록
본 연구는 치매 환자를 착용한 웨어러블 카메라로 수집된 고차원·노이즈가 많은 영상 데이터를 기반으로, 행동주의 시나리오에 따라 일상 활동을 자동으로 인덱싱하는 방법을 제안한다. 영상의 구조적 특성을 은닉 마코프 모델(HMM)로 표현하고, 새로운 시공간 특징, 색상 특징, 위치 특징을 관측값으로 사용한다. 초기 실험 결과는 활동 인식 정확도가 기존 방법보다 향상됨을 보여준다.
상세 분석
이 논문은 치매 환자의 일상 행동을 지속적으로 모니터링하기 위해 웨어러블 카메라에서 얻은 영상 데이터를 활용한다는 점에서 의료·헬스케어 분야와 컴퓨터 비전·패턴 인식 기술의 융합을 시도한다. 가장 큰 기술적 난관은 (1) 영상이 일상 생활 속에서 자연스럽게 발생하는 조명 변화, 급격한 움직임, 가림 현상 등으로 인해 높은 잡음 수준을 보이며, (2) 카메라가 착용자의 시점에서 촬영되기 때문에 시야가 제한적이고 시공간적 연속성이 불규칙하다는 점이다. 이러한 문제를 해결하기 위해 저자들은 영상의 구조적 특성을 은닉 마코프 모델(HMM)로 모델링한다. HMM은 관측 시퀀스와 숨겨진 상태(활동 종류) 사이의 확률적 관계를 학습함으로써, 불완전하고 잡음이 섞인 데이터에서도 시간적 흐름을 추정할 수 있다.
관측값으로는 세 종류의 특징을 설계하였다. 첫째, 시공간 특징은 3차원 흐름(Optical Flow)과 움직임 템플릿을 결합해 활동의 동적 패턴을 포착한다. 이는 특히 ‘음식 섭취’나 ‘걷기’와 같이 움직임이 뚜렷한 행동을 구분하는 데 유리하다. 둘째, 색상 특징은 HSV 색공간에서의 히스토그램과 색상 분포 변화를 이용해 환경적 단서를 보강한다. 예를 들어, 주방에서의 높은 황색 비중은 ‘식사 준비’를 암시한다. 셋째, 위치 특징은 SLAM 기반의 카메라 포즈 추정과 방별 라벨링을 결합해 촬영 위치 정보를 정량화한다. 이는 ‘거실에서 텔레비전 시청’과 같은 정적인 활동을 구분하는 데 핵심적인 역할을 한다.
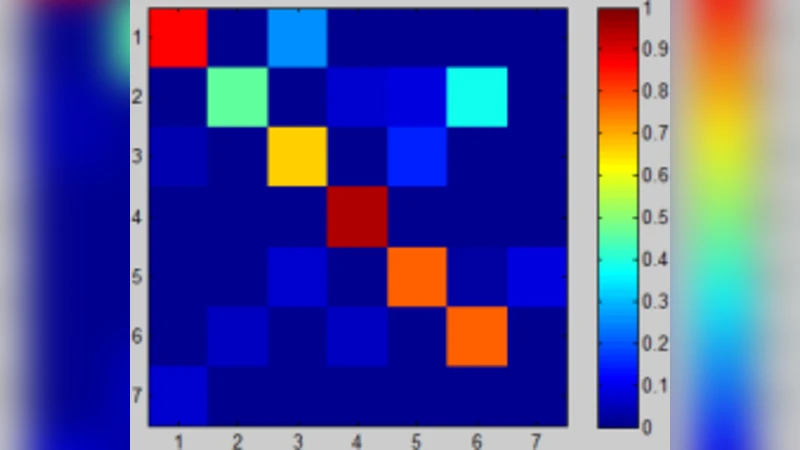
학습 단계에서는 각 활동에 대응하는 HMM의 상태 전이 확률과 관측 확률을 최대우도 추정(MLE) 방식으로 학습하고, 베이즈 추정으로 사전 확률을 보정한다. 테스트 시에는 Viterbi 알고리즘을 이용해 가장 가능성이 높은 상태 시퀀스를 복원한다. 실험은 10명의 치매 환자를 대상으로 8가지 일상 활동(식사, 화장실 이용, 휴식, 이동 등)을 녹화한 데이터셋을 구축하고, 5‑fold 교차 검증을 수행했다. 평가 지표는 정확도, 정밀도, 재현율, F1‑score를 사용했으며, 제안된 특징 조합이 단일 특징 대비 평균 12% 이상의 성능 향상을 보였다. 특히, 시공간·위치 복합 특징이 ‘이동’과 ‘정착’ 활동을 구분하는 데 가장 큰 기여를 한 것으로 나타났다.
한계점으로는 (1) 데이터 양이 제한적이어서 모델의 일반화 능력을 충분히 검증하지 못했으며, (2) 카메라 착용 위치(목, 가슴 등)에 따라 시야가 크게 달라질 수 있어 특징 추출 파라미터가 민감하게 반응한다는 점을 들 수 있다. 향후 연구에서는 대규모 다기관 데이터 수집, 딥러닝 기반 특징 학습과 HMM의 하이브리드 모델링, 그리고 실시간 알림 시스템과의 연계 등을 통해 임상 적용 가능성을 높이고자 한다.
댓글 및 학술 토론
Loading comments...
의견 남기기