최적 명시적 시간 적분법을 통한 자이로동역학 방정식의 효율 향상
초록
본 논문은 대규모 플라즈마 시뮬레이션에 사용되는 자이로동역학 방정식의 시간 적분 효율을 높이기 위해, 충돌 항에는 1차 Runge‑Kutta‑Chebyshev(RKC) 스키마를, 나머지 항에는 4차 Runge‑Kutta 스키마를 결합한 연산자 분할 기법을 제안한다. 또한 비선형 E×B 대류에 의해 발생하는 고유값의 허수축 이동을 이용해 비선형 타임스텝을 정확히 추정함으로써, 실제 계산에서 최대 3배의 속도 향상을 달성하였다.
상세 분석
이 연구는 자이로동역학(Gyrokinetic) 방정식이 고차원(5차원) 위상공간에서 복잡한 선형·비선형 연산자를 포함한다는 점에 주목한다. 기존에 사용되던 전역적인 명시적 Runge‑Kutta(RK) 스키마는 가장 빠른 고유값(주로 E×B 대류에 의한 허수축 이동)이나 충돌 연산자의 실수축 감소에 의해 타임스텝이 제한되었다. 저자들은 연산자를 세 부분(L, N, C)으로 분리하고, 각각에 최적화된 스키마를 적용하였다. 충돌 연산자 C는 실수축에 크게 영향을 미치며, RKC‑4와 같은 1차 스키마가 넓은 실수 안정 영역을 제공하므로, 충돌이 강한 경우에도 명시적으로 처리할 수 있다. 반면, 선형(L)과 비선형(N) 항은 주로 허수축에 위치한 고주파 모드가 제한 요인이므로, 4차 RK4 혹은 RK4M 스키마가 효율적이다.
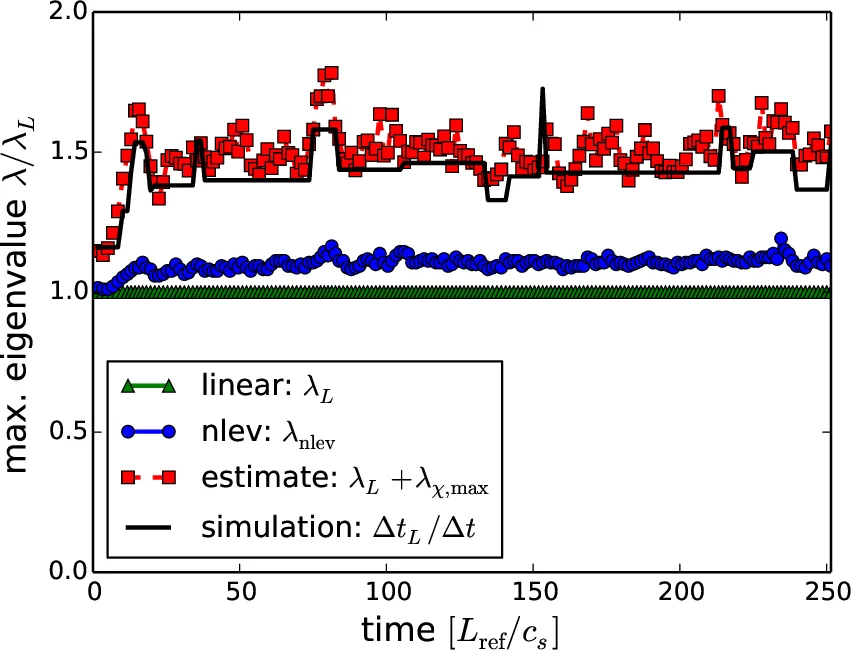
핵심적인 혁신은 비선형 단계에서 E×B 대류가 고유값을 순수히 허수축으로 이동시킨다는 관찰이다. 이를 이용해 현재 시점의 최대 대류 속도 vₓᵧ를 측정하고, CFL 형태의 제한식 Δt≈C·Δx/|vₓᵧ|를 적용함으로써, 기존에 보수적으로 잡던 타임스텝보다 약 2~3배 큰 값을 안전하게 사용할 수 있다. 또한, 고유값 스펙트럼을 직접 계산해 최적의 Δt를 사전에 파악하는 절차를 제시하여, 시뮬레이션 초기 단계에서 불필요한 타임스텝 감소를 방지한다.
연산자 분할과 최적 타임스텝 추정이 결합되면, 전체 연산량은 스테이지 수와 연산자 호출 횟수에 따라 달라지지만, 실제 GENE 코드에 적용한 결과 평균 2.5배, 최악의 경우 3배까지 실행 시간이 단축되었다. 이는 이미 고도로 최적화된 코드에 추가적인 30~70%의 성능 향상을 제공하는 것으로, 대규모 플라즈마 튜링 시뮬레이션에서 실질적인 연구 범위를 확대한다.
댓글 및 학술 토론
Loading comments...
의견 남기기