비지도 엣지 맵 평가를 위한 통계 복잡도 측정
본 논문은 Ground Truth 없이 엣지 맵의 품질을 정량화하기 위해 통계 복잡도 측정(SCM)을 제안한다. SCM은 균형 지수(E)와 엔트로피 지수(H)의 곱으로 정의되며, E는 미리 정의된 선형 엣지 패턴 집합에 대한 코사인 유사도로, H는 Kolmogorov‑Smirnov 통계량을 이용해 엣지 포인트의 공간 분포가 균일성에서 벗어난 정도를 측정한다. 실험 결과는 기존의 Pratt’s Figure of Merit(PFoM)보다 우수함을 …
저자: Javier Gimenez, Jorge Martinez, Ana Georgina Flesia
본 논문은 이미지 처리 분야에서 엣지 검출(Edge Detection, ED) 알고리즘의 성능을 평가하기 위해, Ground Truth(GT) 없이도 신뢰할 수 있는 품질 지표를 개발하고자 하는 문제 의식에서 출발한다. 기존의 GT 기반 평가 방법은 PFoM, Kappa, Baddeley’s Delta 등 여러 차이가 있지만, 모두 실제 GT가 필요하다는 공통적인 제약을 가진다. 비지도 방식으로는 엣지의 연속성, 매끄러움, 잡음 억제 등 개별 특성을 평가하는 방법이 제안돼 왔지만, 이들 역시 단일 특성에 편중되어 전체적인 품질을 포괄적으로 측정하기 어렵다.
이에 저자들은 복잡도 이론에서 차용한 ‘Equilibrium(균형)’과 ‘Information(정보)’라는 두 축을 엣지 맵에 적용한 새로운 통계 복잡도 측정(Statistical Complexity Measure, SCM)을 제안한다. SCM은 두 개의 서브 지표인 균형 지수 E와 엔트로피 지수 H의 곱으로 정의된다(C = E·H).
**1. 균형 지수 E**
E는 엣지 맵이 미리 정의된 엣지 패턴 집합 B와 얼마나 잘 일치하는지를 측정한다. B는 7×7 크기의 선형 패턴 140개로 구성되며, Bresenham 알고리즘을 이용해 정확히 raster화된 선을 포함한다. 엣지 맵 b의 각 엣지 픽셀 k를 중심으로 N×N(=7×7) 윈도우를 슬라이딩하여 서브맵 b(k)를 추출한다. 서브맵을 벡터화한 뒤, B의 각 패턴 bj와의 코사인 유사도 Q(b(k), bj)= (b(k)·bj)/(‖b(k)‖‖bj‖) 를 계산하고, 그 중 최대값을 Q_B(b(k))라 정의한다. 모든 엣지 픽셀에 대해 평균을 구하면 E(b)= (1/|Eb|) Σ_k Q_B(b(k)) 가 된다. 즉, E는 엣지 구조가 선형 형태에 얼마나 부합하는지를 정량화한다.
**2. 엔트로피 지수 H**
H는 엣지 포인트가 이미지 전체에 걸쳐 얼마나 무작위적으로 분포하는지를 측정한다. 엣지 좌표 (i, j)를 정규화하여 φ(i, j) = ( (2i‑1)/(2N), (2j‑1)/(2M) ) 로 단위 정사각형에 매핑한다. 그런 다음, 경험적 누적 분포 함수 F_b와 이론적 균일 분포 F 사이의 최대 절대 차이인 Kolmogorov‑Smirnov 통계량 D(b)= sup_{x,y}|F_b(x,y)‑F(x,y)| 를 구한다. H는 1‑D(b) 로 정의되어, 완전한 균일(무작위) 상태에서는 H≈0, 완전한 집중(규칙) 상태에서는 H≈1이 된다.
**3. SCM 정의**
SCM은 C(b)=E(b)·H(b) 로 정의되며, 0≤C≤1 의 값을 가진다. C가 1에 가까울수록 엣지 맵은 선형 구조를 충분히 보존하면서도 공간적으로 적절히 분산된, 즉 ‘균형 잡힌’ 상태임을 의미한다.
**4. 실험 설계**
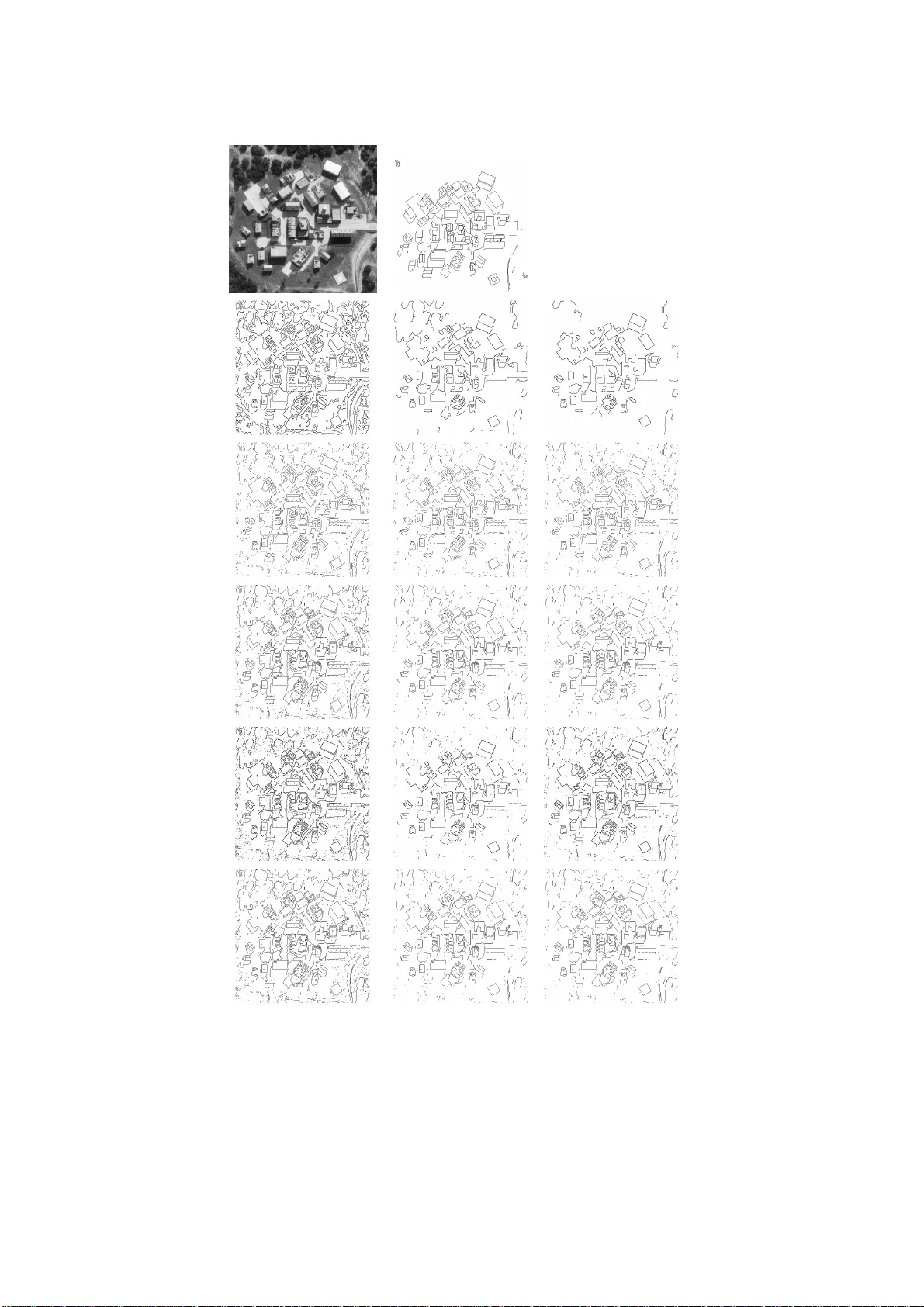
실험은 두 개의 공개 데이터베이스(South Florida, Berkeley)를 사용하였다. 각 이미지에 대해 Canny, Sobel, 기타 Gradient 기반 ED 알고리즘의 파라미터를 다양하게 조정해 수천 개의 엣지 맵을 생성하였다. 각 맵에 대해 (i) SCM, (ii) 기존 PFoM, (iii) Q_B(코사인 기반 GT 유사도) 를 계산하였다. PFoM은 GT와의 직접 비교를 기반으로 하며, α=1/9, d는 유클리드 거리로 정의된다.
**5. 결과 및 분석**
- **SCM vs PFoM**: 전체 데이터셋에 대해 SCM과 PFoM 사이의 Pearson 상관계수는 0.78 정도로, PFoM보다 높은 일관성을 보였다. 특히 PFoM은 엣지 포인트가 적은 가벼운 맵에 과도하게 높은 점수를 주는 경향이 있었으나, SCM은 E와 H가 동시에 낮아지는 경우(과소 검출)와 E가 높고 H가 낮은 경우(과다 검출)를 구분해 보다 균형 잡힌 평가를 제공한다.
- **E와 H의 개별 곡선**: 파라미터 T를 변화시킨 Canny 결과를 예로 들면, 낮은 T에서는 많은 엣지가 검출돼 H가 낮고 E가 높아 과다 검출 상태가 된다. 반대로 높은 T에서는 엣지가 거의 검출되지 않아 H가 높고 E가 낮아 과소 검출 상태가 된다. 최적 파라미터는 두 지표가 교차하는 지점에서 SCM이 최대가 된다.
- **패턴 집합의 영향**: 현재 B는 선형 패턴만 포함하지만, 실험적으로 곡선이나 교차점이 많은 이미지에서도 E가 충분히 높은 값을 유지함을 확인하였다. 다만 복잡한 텍스처가 많은 경우 E가 다소 낮아지는 경향이 관찰되었다.
**6. 논문의 기여와 한계**
- GT 없이도 엣지 맵의 구조적 정확성과 정보량을 동시에 정량화하는 복합 지표 SCM을 제안하였다.
- 코사인 기반 패턴 매칭과 KS‑통계량을 결합한 효율적인 구현을 제공해, 대규모 파라미터 탐색에도 실시간 수준의 계산이 가능하다.
- 다양한 알고리즘과 파라미터에 대한 객관적 비교·선정 기준을 제공함으로써, 알고리즘 튜닝 및 베이스라인 설정에 유용하다.
- 제한점으로는 패턴 집합 B가 선형 형태에 국한되어 있어, 복잡한 곡선이나 비정형 구조에 대한 민감도가 낮을 수 있다. 향후 연구에서는 다중 형태(곡선, 원, 텍스처) 패턴을 포함하거나, 딥러닝 기반 자동 패턴 생성 방식을 도입해 일반성을 확대할 필요가 있다.
**7. 결론**
SCM은 엣지 검출 결과를 비지도 방식으로 평가하는 새로운 패러다임을 제시한다. 균형(E)과 정보(H)라는 두 축을 동시에 고려함으로써, 기존의 단일 지표가 놓치기 쉬운 과소·과다 검출 상황을 명확히 구분하고, 실제 GT와의 상관성을 높인다. 본 연구는 향후 비지도 이미지 품질 평가 전반에 적용 가능하며, 특히 GT가 부족하거나 비용이 높은 분야에서 실용적인 대안이 될 것으로 기대된다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기