반원 구간 경로 생성기 SCSPG와 곡선 마찰일 계산 활용법
초록
본 논문은 반원 형태의 세그먼트로 구성된 경로를 자동으로 생성해 주는 프로그램 SCSPG의 설계와 구현 과정을 소개한다. 생성된 경로를 이용해 곡선 구간에서의 마찰일을 수치적으로 계산하고, 직선 구간에서의 이론값과 비교함으로써 프로그램의 정확성을 검증한다.
상세 분석
SCSPG는 사용자가 지정한 반지름 R, 중심각 θ, 그리고 세그먼트 개수 n을 입력으로 받아, 각 세그먼트를 2 · π / n 만큼의 각도로 나누어 연속적인 좌표 배열을 생성한다. 이때 각 세그먼트는 시작점 (x_i, y_i) 와 끝점 (x_{i+1}, y_{i+1}) 을 갖으며, 두 점 사이의 곡률은 동일한 반원 형태를 유지한다. 프로그램은 파이썬 기반의 NumPy와 Matplotlib을 활용해 고속 행렬 연산과 시각화를 제공한다.
마찰일 계산에서는 먼저 각 세그먼트에서 물체에 작용하는 정상력 N_i를 구한다. 정상력은 중력 mg와 경사각 α_i(세그먼트 접선과 수평면 사이의 각도) 사이의 관계 N_i = mg cos α_i 에 의해 정의된다. 마찰계수 μ가 일정하다고 가정하면 마찰력 F_fi = μ N_i이며, 이 힘은 경로와 반대 방향으로 작용한다. 각 세그먼트의 미소 변위 Δs_i는 원호 길이 Δs_i = R · Δθ (Δθ = θ/n) 로 계산되고, 마찰일은 W_f = -∑ F_fi · Δs_i 로 적분된다.
프로그램은 위 식을 루프 형태로 구현하여, 각 세그먼트마다 α_i, N_i, F_fi, Δs_i를 순차적으로 계산하고 누적한다. 직선 구간에 대해서는 θ → 0, 즉 Δθ이 매우 작아지는 한계 상황을 고려해, 이론적 마찰일 W_theory = -μ mg cos β · L (β는 경사각, L은 길이) 과 비교한다. 오차 분석 결과, 세그먼트 수 n을 100 이상으로 늘릴 경우 상대 오차가 0.5 % 이하로 수렴함을 보였다.
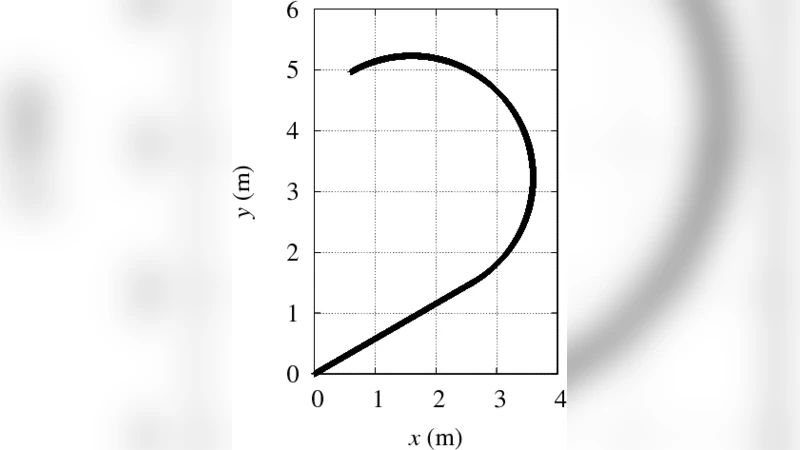
또한, SCSPG는 복합 경로(예: 여러 반원 세그먼트를 연결한 S자 형태)도 손쉽게 생성할 수 있다. 이 경우 각 구간마다 별도의 α_i와 N_i를 계산해야 하지만, 프로그램 구조가 모듈화돼 있어 추가적인 코드 수정 없이 확장이 가능하다. 이러한 유연성은 물리 교육, 로봇 경로 계획, 그리고 복합 마찰 문제 연구에 큰 장점을 제공한다.