평면 나선 코일 센서를 이용한 3차원 위치 재구성 시도와 그 실패 원인 분석
초록
본 논문은 평면 나선 코일 센서(PSCS)의 감도 모델을 제시하고, 세 개의 센서를 x, y, z축에 배치하여 물체의 3차원 위치를 추정하려는 시도를 설명한다. 제안된 자기일관적(self‑consistent) 반복 알고리즘을 적용했지만, 위치와 센서 출력 사이에 존재하는 2차 항 때문에 역변환이 비유일적이며, 실제 위치를 정확히 복원하지 못한다는 결론에 이른다.
상세 분석
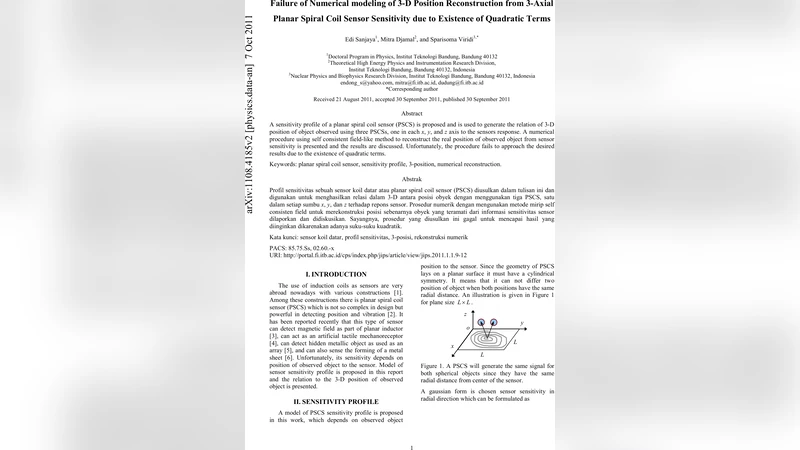
이 연구는 PSCS가 평면에 놓여 원통형 대칭을 가진다는 가정 하에, 방사형 방향의 감도를 가우시안 형태(식 1)로, 축방향은 지수형(식 2)으로 모델링한다. 세 개의 센서를 각각 xy, yz, zx 평면에 배치하고, 각 센서의 출력 S ij는 물체 좌표 (x, y, z)와 센서 중심 사이의 거리 ρ와 축거리 h를 이용해 식 5로 표현한다. 이후 새로운 변수 Sx, Sy, Sz를 도입해 식 6‑8을 전개하고, 로그 변환을 통해 x, y, z를 직접 구할 수 있는 식 9‑11을 도출한다. 최종적으로 식 15는 세 센서 출력의 조합으로 좌표를 추정하는 비선형 방정식이며, 이를 자기일관적 반복법(초기 추정 → 식 15 적용 → 수렴 검사)으로 풀고자 한다.
하지만 식 15는 x·y, y·z, z·x와 같은 교차 2차 항을 포함하고 있다. 이러한 항들은 좌표 부호를 반전시켜도 출력값이 동일하게 만들기 때문에, 역변환이 다중해를 갖게 된다. 실제 시뮬레이션에서는 초기값 (0,0,0) 혹은 (L/2, L/2, L/2)에서 시작했음에도 불구하고, 결과 좌표가 원래 설정값과 크게 달라지는(Table 2) 현상이 관찰되었다. 이는 수렴이 잘못된 로컬 최소점에 머물렀거나, 식 자체가 비유일 매핑을 제공하기 때문으로 해석된다.
논문은 이 현상을 코사인 함수의 부호 손실(θ∈
댓글 및 학술 토론
Loading comments...
의견 남기기