네트워크 제어 시스템, 희소한 관측기 제어기 망으로 안정화하다
안내: 본 포스트의 한글 요약 및 분석 리포트는 AI 기술을 통해 자동 생성되었습니다. 정보의 정확성을 위해 하단의 [원본 논문 뷰어] 또는 ArXiv 원문을 반드시 참조하시기 바랍니다.
초록
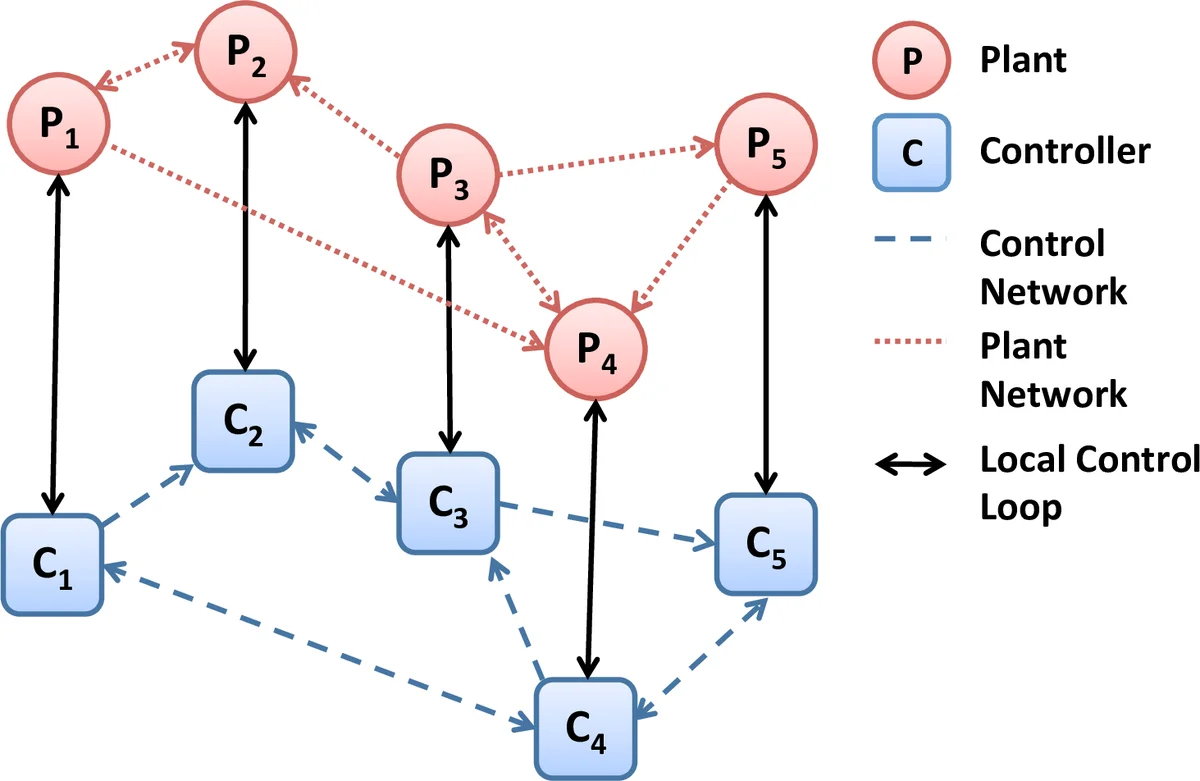
본 논문은 임의의 토폴로지를 가진 선형 시불변 네트워크 제어 시스템(NCS)에 대한 안정성 조건을 Lyapunov 직접법으로 제시하고, 이를 활용하여 희소한 관측기 기반 제어 네트워크를 설계하는 새로운 저복잡도 알고리즘을 제안한다. 분산 관측기를 통해 다른 노드의 출력을 활용하여 각 관측기 동역학의 안정성을 향상시키며, 제어기 및 관측기 이득의 노름에 상한을 두어 무한 증가를 방지한다. 또한 완전 분산화 조건을 탐색할 때 이러한 상한 완화의 효과를 논의한다.
상세 분석
이 논문은 네트워크 제어 시스템(NCS) 설계에서 중요한 희소성(Sparsity)과 분산 관측 문제를 통합적으로 해결한 점에서 의미가 있다. 기존 연구가 주로 제어기 네트워크의 구조적 제약(예: Quadratic Invariance, Poset)에 초점을 맞췄다면, 본 연구는 임의의 플랜트 네트워크 토폴로지 하에서 상태 추정(관측) 문제를 포함한 보다 일반적인 설정을 다룬다.
핵심 기술적 기여는 다음과 같다:
- Lyapunov 기반 안정성 조건 (Lemma 1): 계단식 시스템 구조를 가진 폐루프 시스템(상태 방정식과 오차 방정식)의 전역 점근적 안정성을 보장하는 조건을 제시한다. 이 조건은 대각 행렬 구조의 Lyapunov 행렬(P, ˆP)과 안정성 마진(β)을 포함하여 각 서브시스템별 안정성 요구사항을 반영한다.
- 혼합 정수 볼록 최적화 문제 형성 (Theorem 1): 원래의 비볼록-정수 계획 문제를, 변수 변환(예: Z = P^{-1})과 노름 제약의 볼록 근사를 통해 혼합 정수 반정부호 계획(MISDP) 문제로 재정의한다. 이때, 이진 변수 α_ij는 제어 링크(i→j)의 존재 여부를 나타내며, 목적함수는 이 링크 수의 최소화이다. 이를 통해 희소한 관측기-제어기 네트워크를 설계할 수 있다.
- 완전 분산화 가능 조건 탐색 (Theorem 2 & 3): 제어기 및 관측기 이득에 대한 노름 제약이 없거나 충분히 클 때, 플랜트 네트워크 결합 행렬 H의 노름이 일정 조건(대수적 리카티 방정식 해로 표현) 아래에 있으면 완전 분산화(즉, L=0, O=0)가 가능함을 보인다. 이는 강한 결합 하에서는 분산 제어가 불가능할 수 있음을 시사하는 동시에, 결합 강도와 허용 이득 크기가 분산화 가능성에 미치는 영향을 정량적으로 분석할 수 있는 틀을 제공한다.
논문의 접근법은 이론적 엄밀성(안정성 보장)과 실용적 설계(희소성 최적화)의 균형을 잘 맞추고 있다. 그러나 제안된 MISDP 문제는 대규모 네트워크에 적용 시 계산 복잡도가 높을 수 있으며, 통신 지연이나 패킷 손실 등 실제 네트워크 결함을 고려하지 않았다는 한계가 있다. 후속 연구에서는 이러한 실용적 제약을 포함한 확장이 필요할 것이다.
댓글 및 학술 토론
Loading comments...
의견 남기기