부트스트랩을 이용한 지속성 다이어그램과 풍경의 신뢰 구간
본 논문은 지속성 다이어그램과 지속성 풍경에 대해 경험적 부트스트랩을 적용해 신뢰 집합과 신뢰 밴드를 구성하는 방법을 제시한다. 핵심 아이디어는 안정성 정리를 이용해 밀도 추정 오차를 보정하고, 부트스트랩 경험적 과정으로 얻은 quantile 를 통해 (1‑α) 수준의 확률적 보장을 제공한다는 것이다.
저자: Frederic Chazal, Brittany Terese Fasy, Fabrizio Lecci
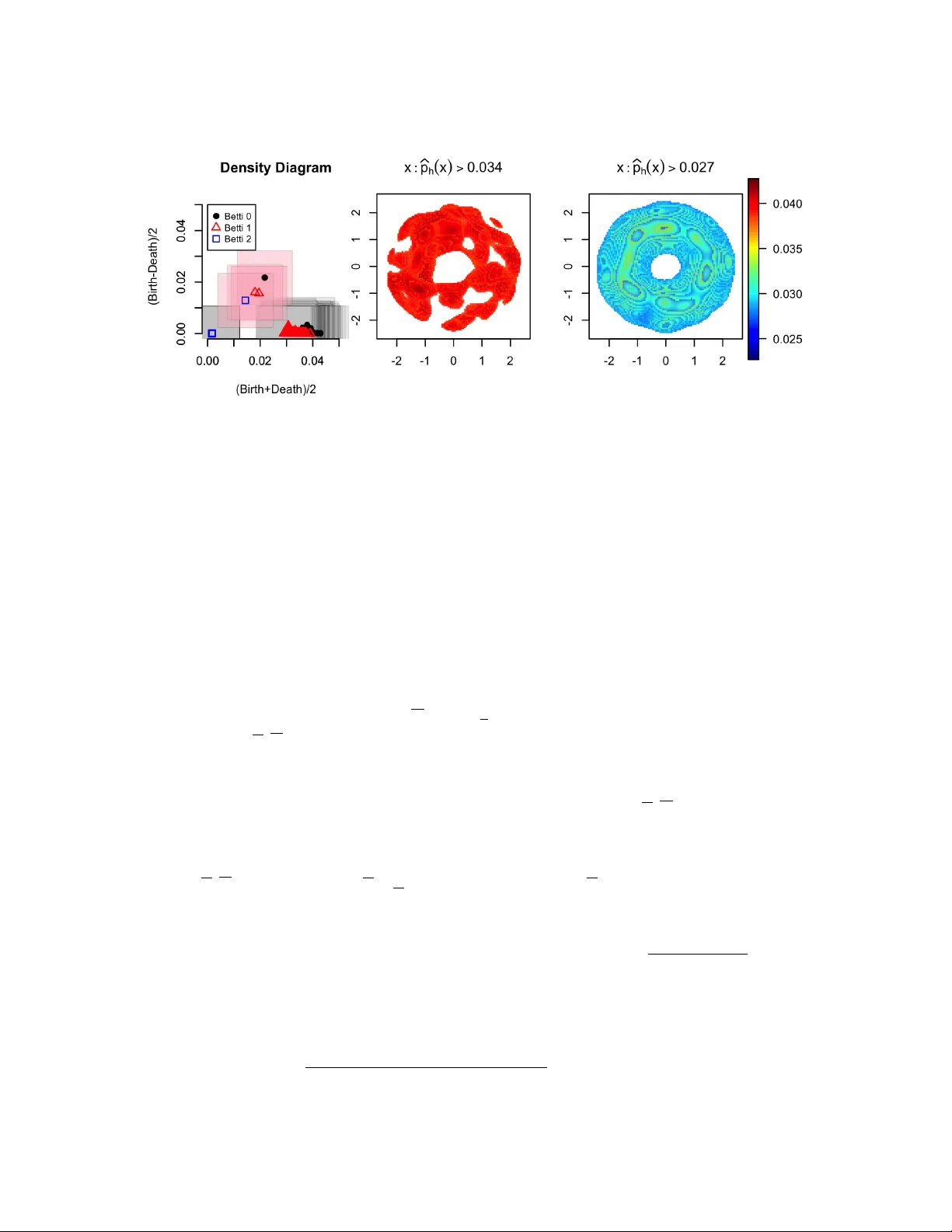
본 논문은 지속성 호몰로지를 이용한 위상 데이터 분석에 통계적 신뢰성을 부여하기 위해 경험적 부트스트랩을 적용하는 방법을 제시한다. 먼저 지속성 다이어그램과 지속성 풍경이라는 두 가지 위상 요약 통계량을 정의한다. 지속성 다이어그램은 각 위상 특징의 탄생(birth)과 사망(death) 시점을 ( (b+d)/2 , (b‑d)/2 ) 형태의 점으로 나타내며, 이 점들의 집합을 P라 부른다. 지속성 풍경은 각 점 p∈P에 대해 삼각 함수 t_p(z)를 정의하고, 주어진 z에 대해 k번째 최대값을 취해 L_P(k,z)=k‑max_p t_p(z) 로 만든다. 논문에서는 주로 k=1인 1‑층 풍경 L(t)=L_P(1,t)를 사용한다.
위상 요약 통계량의 안정성을 보장하기 위해 볼테넥 거리 W_∞와 무한노름 ‖·‖_∞ 사이의 관계를 나타내는 안정성 정리(Theorem 1.1)를 활용한다. 이 정리는 두 연속 함수 f,g에 대해 W_∞(P_f,P_g) ≤ ‖f−g‖_∞ 임을 보이며, 따라서 밀도 추정 오차가 지속성 다이어그램의 오차를 직접 제어한다는 중요한 통찰을 제공한다.
통계적 추정 단계에서는 표본 X₁,…,X_n 으로부터 커널 밀도 추정기 p̂_h를 만든다. 여기서 K는 정규화된 커널, h는 밴드폭이다. p̂_h는 확률 밀도 함수이며, 이를 이용해 지속성 다이어그램 bP_h와 풍경 L_h를 계산한다. 목표는 실제 밀도 p_h와 그에 대응하는 지속성 다이어그램 P_h 사이의 차이를 확률적 신뢰 구간으로 표현하는 것이다.
이를 위해 논문은 부트스트랩 절차를 두 단계로 나눈다. 첫 번째는 일반적인 부트스트랩으로, 표본으로부터 경험적 분포 P_n을 만든 뒤, P_n에서 재표본을 뽑아 부트스트랩 복제 p̂_h^{*}를 얻는다. √n‖p̂_h^{*}−p̂_h‖_∞ 의 경험적 분포를 시뮬레이션을 통해 추정하고, 그 (1‑α) quantile q_α를 구한다. 안정성 정리에 의해 W_∞(bP_h,P_h) ≤ q_α/√n 가 되므로,
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기