도시 이동성 스케일링: 작은 데이터가 보여주는 교통 모드별 차이와 시간·공간 변동
본 논문은 독일의 전통적인 설문 기반 이동 데이터(MID 2008)를 활용해 교통 모드, 목적, 요일·시간대 등 범주별로 이동 거리의 스케일링 특성을 분석한다. 모드별 파워‑law 지수(α)가 크게 달라 ‘보행‑자전거’와 ‘자동차‑대중교통’이 서로 다른 유니버설리티 클래스를 형성함을 확인했다. 또한 도시 규모와 인구에 따른 평균 거리 차이는 미미하지만, 요일·시간에 따라 모드 비중과 평균 거리가 변한다는 점을 제시한다. 이러한 결과는 기존 ‘빅…
저자: Galen Wilkerson, Ramin Khalili, Stefan Schmid
본 논문은 최근 ‘빅 데이터’ 기반 이동성 스케일링 연구가 겪는 범주 정보 부재와 샘플링 편향 문제를 보완하고자, 독일의 전통적인 설문 조사 데이터인 MID 2008을 활용한다. MID는 2008년 2월부터 2009년 3월까지 25,922가구, 60,713명으로부터 193,290개의 일일 트립과 36,182개의 야간 여행 데이터를 수집했으며, 각 트립은 실제 이동 거리(100 m 정밀도), 주요 교통 수단(보행, 자전거, 자동차 운전, 자동차 승객, 대중교통), 출발·도착지, 목적, 요일·시간 등의 메타데이터를 포함한다.
**연구 배경 및 동기**
‘빅 데이터’(달러빌 이동, CDR, 소셜 미디어 체크인 등)는 방대한 규모와 저비용 수집이 장점이지만, 위치 정확도가 셀 타워 수준에서 수 미터까지 다양하고, 교통 모드·목적·승객 수 등 중요한 범주 정보를 거의 제공하지 않는다. 또한, 체크인 간 거리를 유클리드 거리로 근사하는 경우가 많아 실제 트립 길이와 차이가 발생한다. 이러한 한계는 특히 도시 규모(≤ 15 km)에서 스케일링 지수를 왜곡하고, 모드별 차이를 가려버린다.
**데이터와 방법론**
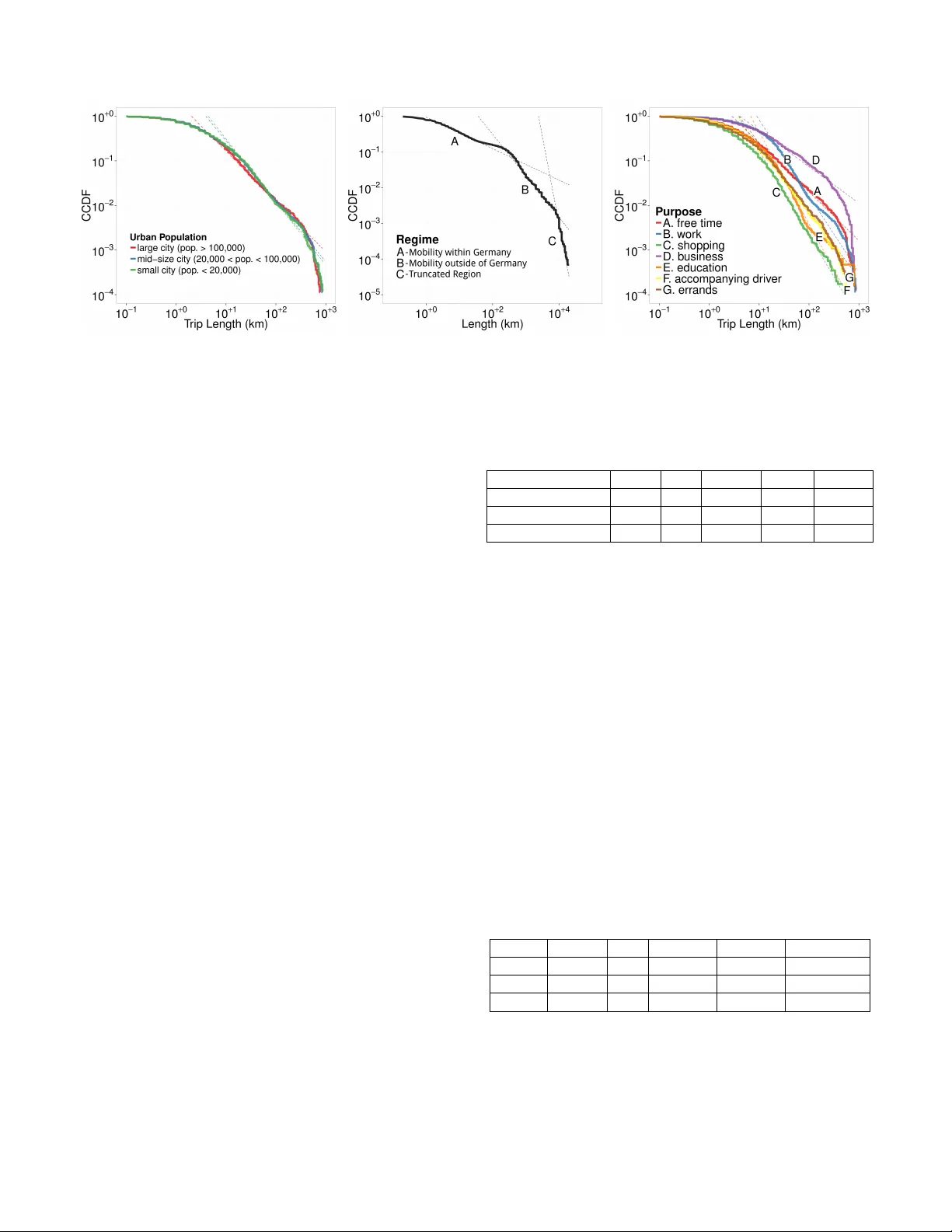
연구자는 MID 데이터를 ‘리틀 데이터’라 명명하고, 다음과 같은 분석 흐름을 취한다. 1) 트립을 시작점이 인구 10⁵ 명 이상인 도시인 경우 ‘도시 트립’으로 정의하고, 도시 직경을 약 14.9 km(≈ 10¹·¹⁷ km)로 설정한다. 2) 각 교통 모드별 트립 길이 분포를 누적 분포함수(CCDF) 형태로 시각화하고, 파워‑law(p(`) ∝ `^‑α) 모델을 최소 거리 `₀부터 최대우도 추정(MLE)과 Kolmogorov‑Smirnov(KS) 검정으로 적합한다. 3) 모드별 평균(`¯`)과 분산(σ²) 등 1차·2차 모멘트를 계산하고, 도시 규모(소·중·대)와 요일·시간에 따른 변화를 추가 분석한다.
**주요 결과**
1) **모드별 스케일링 차이**
- 보행(A): α ≈ 3.99, 평균 6.37 km, 분산 1.37 km² → 평균·분산 모두 유한.
- 자전거(B): α ≈ 2.72, 평균 6.37 km, 분산 3.47 km² → 평균은 정의되지만 분산이 발산.
- 자동차 운전(C): α ≈ 2.29, 평균 39.90 km, 분산 13.06 km² → 평균 정의, 분산 발산.
- 대중교통(D): α ≈ 1.97, 평균 27.98 km, 분산 16.34 km² → 평균·분산 모두 정의되지 않음.
이는 동일한 거리 구간에서도 모드에 따라 전혀 다른 확률적 특성을 보이며, ‘보행‑자전거’와 ‘자동차‑대중교통’이 서로 다른 유니버설리티 클래스를 형성함을 의미한다.
2) **정규화된 트립 길이**
각 모드별 최대 트립 길이(`max`)로 정규화한 CCDF를 보면, 10⁻³ ~ 10⁻¹ `max` 구간에서는 비모터화(보행·자전거)와 모터화(자동차·대중교통)가 각각 비슷한 꼬리를 보이지만, 10⁻¹ ~ 1 `max` 구간에서는 모터화가 훨씬 긴 꼬리를 나타낸다. 이는 모드가 거리와 도시 형태에 따라 다른 메커니즘으로 작동한다는 가설을 뒷받침한다.
3) **도시 규모와 트립 길이**
도시 인구를 소(≤ 20 k), 중(20 k ~ 100 k), 대(> 100 k)로 구분했을 때, 평균 트립 길이 차이는 29 km ~ 30 km 수준으로 미미했다. 이는 도시 규모 자체가 트립 길이의 주요 결정 요인은 아니라는 점을 시사한다.
4) **시간·요일 변동**
일요일에 자동차 운전 비중이 낮음에도 평균 트립 길이는 수요일보다 길었다. 이는 주말에 장거리 이동(레저·가족 방문)이 증가하고, 대중교통·보행이 상대적으로 짧은 거리로 전환되는 패턴을 반영한다.
5) **통합 스케일링**
일일 트립과 야간 여행을 합산하면 전체 스케일링 지수 α ≈ 1.44가 도출되며, 이는 기존 ‘빅 데이터’ 연구에서 보고된 1.5 ~ 1.75와 유사하지만, 모드별 차이를 무시한 경우와는 다른 해석이 필요함을 보여준다.
**논의 및 의의**
본 연구는 ‘i.i.d.’ 가정이 현실적이지 않으며, 범주 정보를 무시한 집계가 스케일링 지수를 왜곡할 수 있음을 실증한다. 특히, 모드가 거리 기반 메커니즘(Levy flight, Random walk)과 ‘intervening‑opportunity’(장소 밀도) 사이의 논쟁에 새로운 관점을 제공한다. 모드 선택은 단순히 거리의 함수가 아니라, 도시 형태·인프라·시간대와 복합적으로 상호작용한다는 점을 강조한다.
**실제 적용**
1) **교통 정책**: 모드별 스케일링 차이를 고려하면, 보행·자전거 인프라 확대가 전체 트립 길이와 에너지 소비를 크게 감소시킬 수 있다.
2) **에너지·탄소 모델링**: 모드별 평균·분산을 정확히 반영하면 도시 ‘메타볼리즘’ 모델의 예측 정확도가 향상된다.
3) **스마트 시티 설계**: 시간·요일별 모드 변동을 실시간 교통 관리 시스템에 통합하면, 혼잡 완화와 대중교통 효율성을 높일 수 있다.
**결론**
‘리틀 데이터’는 고해상도 거리와 풍부한 범주 정보를 제공함으로써, 교통 모드별 유니버설리티 클래스를 구분하고, 시간·공간 변동성을 정밀하게 파악할 수 있는 중요한 연구 기반을 제공한다. 이는 기존 ‘빅 데이터’ 기반 연구가 놓칠 수 있는 미세한 메커니즘을 드러내며, 도시 교통 정책·에너지·환경 모델링에 실질적인 인사이트를 제공한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기