개미 이동형 유한 상태 기계
초록
이 논문은 무한 격자에서 시작점에 모인 n개의 이동형 에이전트가 제한된 상수 크기의 메모리와 셀당 상태 존재 여부만을 교환할 수 있는 통신 모델을 이용해 보물(음식) 탐색을 수행하도록 설계하였다. 저자들은 5마리씩 구성된 팀을 지속적으로 방출하고, 네 마리는 각각 북·남·동·서 방향을 안내하는 ‘가이드’ 역할을, 한 마리는 ‘탐색자’가 되어 가이드들의 위치를 이용해 원점으로부터 일정 거리 d의 원을 사각형 형태로 순회하도록 하는 RectSearch 알고리즘을 제시한다. 이상적인 방출 스케줄을 가정하면 모든 셀은 O(D + D²/n) 시간 안에 탐색되며, 이는 기존 튜링 기계 기반 ANTS 모델에서 증명된 하한과 일치한다.
상세 분석
본 논문은 Feinerman 등(2012)이 제시한 ANTS 문제를 유한 상태 기계(FSM) 기반 에이전트 모델로 축소함으로써, 메모리와 통신 능력이 극도로 제한된 상황에서도 기존의 시간 복잡도 한계를 유지할 수 있음을 보였다. 핵심은 (i) 에이전트가 자신의 현재 상태만을 주변 에이전트와 공유하고, (ii) 각 에이전트가 상수 개의 상태만을 가질 수 있다는 제약 하에, 어떻게 효율적인 탐색 패턴을 구현하느냐에 있다.
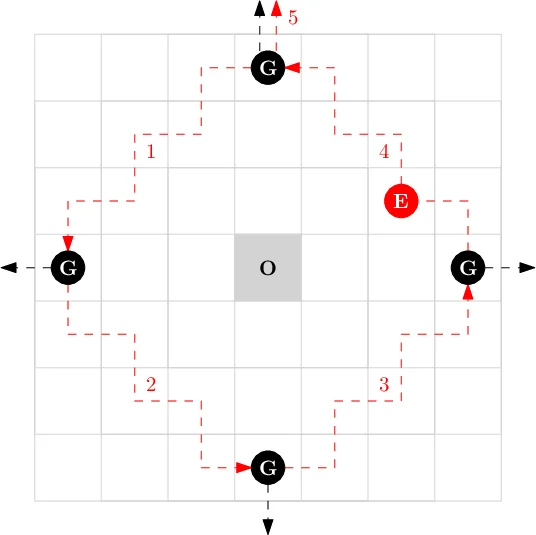
알고리즘 설계는 크게 두 단계로 나뉜다. 첫 번째는 ‘방출 스킴(emission scheme)’으로, 원점에서 매 라운드마다 5개의 에이전트를 하나의 탐색 팀으로 방출한다. 팀 내에서는 네 마리가 NewGuide가 되어 각각 N, S, E, W 방향으로 이동하고, 다섯 번째는 NewExplorer가 된다. NewGuide는 이미 존재하는 Guide를 만나면 그 뒤를 따라 이동해 새로운 Guide가 되며, NewExplorer는 북쪽 Guide를 따라 이동하다가 첫 번째 비가이드 셀에 도달하면 서쪽으로 한 칸 이동해 Explorer가 된다.
두 번째 단계는 ‘RectSearch’이다. Explorer는 현재 북쪽 Guide가 위치한 (0, d) 셀에서 시작해 남서, 남동, 북동, 북서 순서로 대각선 이동하면서 각 방향의 Guide를 만나면 해당 방향으로 전환한다. 이렇게 하면 거리 d에 있는 모든 셀을 8·d 라운드 안에 순회하게 된다(Observation 1). 탐색이 끝나면 Explorer는 북쪽 Guide와 함께 한 칸 위로 이동해 다음 거리 d+1의 사각형 탐색을 시작한다.
알고리즘의 올바름은 Lemma 3과 Lemma 4를 통해 보장된다. Lemma 3은 동일 타입의 에이전트가 원점 이외의 동일 셀에 동시에 존재하지 않음을 증명함으로써 충돌을 방지하고, Lemma 4는 한 레벨을 탐색한 뒤 MovingExplorer가 되면 다른 모든 MovingExplorer가 최소 d+8 거리만큼 원점으로부터 떨어져 있음을 보인다. 이는 레벨 d > n인 경우에도 탐색 팀 간 간섭이 최소화되어 O(d²/n) 라운드 안에 모든 셀을 커버할 수 있음을 의미한다.
시간 복잡도 분석에서는 이상적인 방출 함수 fₙ(t)=t(매 라운드마다 새로운 팀 방출) 를 가정했을 때, 레벨 d≤n에서는 d번째 Explorer가 시간 2d에 탐색을 시작하므로 O(d) 라운드에 완료된다. 레벨 d>n에서는 이미 방출된 팀 수가 n에 제한되므로, 각 Explorer가 레벨 d를 탐색하기까지 평균 O(d²/n) 라운드가 소요된다. 실제 구현에서는 Section 3에서 제시한 ‘거의 이상적인’ 방출 스킴 fₙ(t)=Ω(t−log n)을 사용해 로그 수준의 지연만 발생시키므로, 전체 런타임은 O(D + D²/n)·polylog n 으로 유지된다.
이와 같이, 상수 메모리와 제한된 셀 기반 통신만을 갖는 FSM 에이전트라도, 적절히 설계된 팀 기반 협업과 가이드‑탐색자 구조를 통해 기존 튜링 기계 기반 ANTS 알고리즘과 동일한 최적 시간 복잡도를 달성할 수 있음을 증명하였다.
댓글 및 학술 토론
Loading comments...
의견 남기기