최소 위반 모션 플래닝을 위한 증분 샘플링 기반 알고리즘
초록
**
본 논문은 동역학 제약을 가진 시스템이 목표 지점에 도달하면서 안전 규칙을 가능한 최소 수준으로 위반하도록 제어 전략을 합성하는 방법을 제시한다. 샘플링 기반 플래닝(RRT*·PRM)과 지속 시간 Kripke 구조, 가중치 유한 자동화를 결합해 제품 그래프를 구성하고, 이를 통해 위반 비용과 이동 비용을 동시에 최소화한다. 알고리즘은 무한히 샘플링할 경우 최적해에 거의 확실히 수렴함을 증명하고, 시뮬레이션 및 실제 자율주행 차량 실험으로 검증하였다.
**
상세 분석
**
이 논문은 기존의 샘플링 기반 모션 플래닝(RRT*, PRM)과 형식 검증 기법을 융합하여, “목표 도달은 보장하되 안전 규칙을 최소한으로 위반한다”는 새로운 최적화 목표를 설정한다. 핵심 아이디어는 연속시간 동역학 시스템을 지속 시간 Kripke 구조(Durational Kripke Structure)로 이산화하는 것이다. 이 구조는 상태 집합 S⊂X, 전이 관계 R, 라벨링 함수 L, 전이 지속 시간 Δ를 포함한다. 각 전이는 실제 시스템의 동적 궤적을 근사하며, 라벨링 변화가 최대 한 번만 일어나도록 제한함으로써 연속 궤적과 이산 전이 사이의 일관성을 보장한다.
안전 규칙은 가중치 유한 자동화(Weighted Finite Automaton)로 표현된다. 각 규칙은 우선순위 함수 $:A→ℕ$를 갖는 자동화 A로 모델링되며, 규칙 위반 시 발생하는 비용은 자동화 전이의 가중치로 정의된다. 여러 규칙을 동시에 고려하기 위해 개별 자동화를 곱셈 형태로 결합한 통합 가중치 자동화 AΨ를 만든다. 이 자동화는 입력 알파벳을 2^Π×2^Π 로 정의하고, 모든 가능한 라벨 전이 (σ,σ′)에 대해 허용 전이를 추가함으로써 “규칙을 위반한 경우에도 자동화가 받아들일 수 있게” 만든다. 전이 가중치는 해당 규칙의 우선순위와 위반 지속 시간의 곱으로 설정되어, 불안전 수준 λ(w,Ψ) 를 정확히 측정한다.
다음 단계는 Kripke 구조와 AΨ의 제품 자동화를 구성하는 것이다. 제품 상태는 (s,q) 형태이며, 전이 비용은 Δ(s,s′)·$ + 기존 자동화 가중치가 합산된 형태다. 이 제품 그래프에서 목표 상태(목표 영역에 도달하고 모든 자동화가 수용 상태에 도달한 경우)까지의 최단 경로를 찾으면, 원래 연속 시스템의 궤적 중 불안전 수준을 최소화하고, 동일 수준 내에서는 이동 비용을 최소화한 최적 해를 얻는다.
알고리즘은 기존 RRT의 샘플링·연결 절차에 제품 자동화의 비용 계산을 삽입한 MVRRT*(Minimum‑Violation RRT) 로 구현된다. 새 샘플을 생성할 때, 가장 가까운 기존 노드와의 연결을 시도하고, 연결 가능한 동역학 궤적을 계산한다. 이때 라벨 전이와 지속 시간을 추출해 제품 자동화 전이 비용을 즉시 평가한다. 비용이 기존 경로보다 낮으면 트리를 업데이트한다.
수학적으로는 점근 최적성(asymptotic optimality)을 증명한다. Kripke 구조의 샘플 수 N→∞ 일 때, 제품 그래프는 원래 연속 시스템의 모든 가능한 궤적을 밀도 있게 근사한다. 따라서 MVRRT가 찾는 최단 경로는 확률적으로 최적 경로에 수렴한다. 이 증명은 기존 RRT의 수렴 증명에 가중치 자동화의 라벨 전이 비용이 추가된 형태로 확장된다.
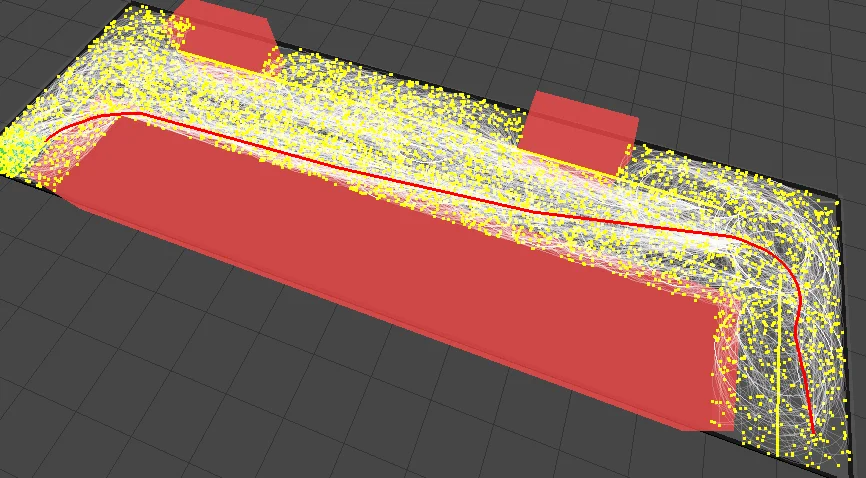
실험에서는 복잡한 도시 도로 환경을 모델링하고, “항상 오른쪽 차선 유지”와 “차선 변경 최소화” 같은 규칙을 우선순위가 다른 두 자동화로 표현하였다. 목표 지점이 오른쪽 차선에 차단된 경우, 알고리즘은 일시적으로 차선을 변경하는 위반을 허용하되, 위반 횟수와 지속 시간을 최소화한다. 시뮬레이션 결과는 기존 RRT가 규칙을 완전히 무시하거나, 규칙을 엄격히 지켜 목표에 도달하지 못하는 경우와 대비해, MVRRT가 불안전 수준과 이동 시간 모두에서 우수함을 보여준다. 실제 자율주행 차량에 적용한 실험에서도 실시간으로 제품 그래프를 업데이트하며 안전 규칙 위반을 최소화하는 경로를 생성, 시스템의 실용성을 입증하였다.
이 논문의 주요 기여는 (1) 연속 동역학을 라벨 전이와 지속 시간을 보존하는 Kripke 구조로 이산화하는 방법, (2) 규칙 위반 비용을 정량화하는 가중치 자동화 설계, (3) 두 구조의 제품을 이용해 최소 위반·최소 비용 경로를 찾는 MVRRT* 알고리즘, (4) 점근 최적성을 이론적으로 증명하고, (5) 시뮬레이션 및 실제 차량 실험을 통한 실증이다. 이러한 접근은 동적으로 변하는 환경에서 안전 규칙을 완화하면서도 최적 성능을 유지해야 하는 자율 시스템에 널리 적용될 수 있다.
**
댓글 및 학술 토론
Loading comments...
의견 남기기