포아송 잡음 제거를 위한 비국소 평균 필터
본 논문은 포아송 잡음 모델에 특화된 비국소 평균(NLM) 기반의 새로운 이미지 복원 알고리즘을 제안한다. “오라클” 추정 개념을 이용해 이론적 최적 수렴 속도를 증명하고, 실제 구현에서는 가중치를 추정된 유사도 함수로 대체한 비국소 평균 포아송 필터(NLMPF)를 설계한다. 실험 결과는 기존 VST‑기반 방법 및 최신 포아송 전용 필터와 비교해 경쟁력 있는 성능을 보여준다.
저자: Qiyu Jin, Ion Grama, Quansheng Liu
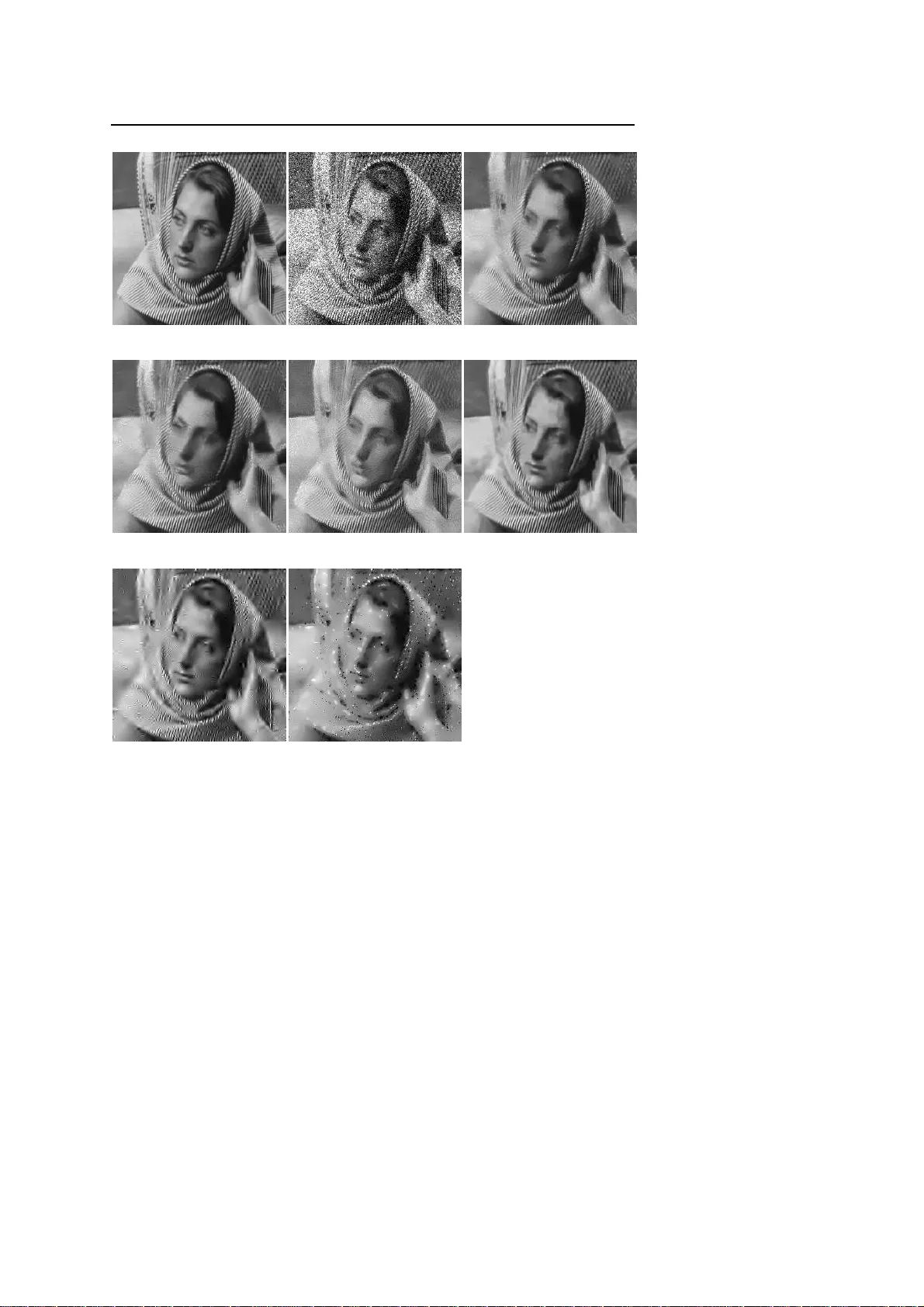
본 논문은 저조도 영상에서 흔히 발생하는 포아송 잡음 제거를 위해 비국소 평균(NLM) 필터의 아이디어를 확장한 새로운 알고리즘을 제안한다. 서론에서는 포아송 잡음이 신호 의존적이며 분산이 평균과 동일한 특성을 갖기 때문에 기존의 가우시안 잡음 전용 방법을 그대로 적용하기 어렵다는 점을 강조한다. 이를 해결하기 위해 기존 연구에서 사용된 VST(Variance Stabilizing Transform)와 같은 변환 기반 방법들을 소개하고, 그 한계점(변환 후 역변환 과정에서 발생하는 편향, 복잡도 증가 등)을 지적한다.
본 연구의 핵심은 “오라클” 추정 개념을 도입해 이론적 최적성을 확보한 뒤, 실제 구현에서는 오라클을 근사하는 적응형 가중치를 설계한다는 점이다. 먼저 연속적인 이미지 함수를 이산화하여 픽셀 집합 I 에 정의하고, 각 픽셀 x 에 대해 포아송 관측값 Y(x) = f(x)+ε(x) (ε의 평균 0, 분산 f(x))를 모델링한다. 검색 윈도우 U_{x₀,h}와 패치 윈도우 U_{x,η}를 각각 정의하고, 전통적인 NLM에서는 패치 간 유클리드 거리를 이용해 가중치 w(x) = exp(−‖Y_{U_{x,η}}−Y_{U_{x₀,η}}‖²/H²) 를 만든다.
하지만 포아송 잡음에서는 ‖Y_{U_{x,η}}−Y_{U_{x₀,η}}‖²의 기대값이 f(x)+f(x₀) 에 비례하므로, 직접적인 거리 측정은 신호 강도에 따라 과도하게 가중치를 왜곡한다. 이를 보완하기 위해 저자들은 오라클 추정량 f*_h(x₀)=∑_{x∈U_{x₀,h}} w*_h(x) Y(x) 를 정의하고, 가중치 w*_h(x) = exp(−ρ_f,x₀(x)²/H²(x₀)) / ∑ exp(…) 형태로 설계한다. 여기서 ρ_f,x₀(x)=|f(x)−f(x₀)| 는 실제 신호 차이를 나타내는 유사도 함수이다.
이론적 분석에서는 두 가지 정리를 제시한다. 정리 1은 검색 윈도우 크기 h 를 h=⌊Γ^{4β} L^{-2} ⌋^{1/(2β+2)} n^{-1/(2β+2)} (Γ는 신호 상한, β는 Hölder 연속성 지수, L은 상수) 로 설정하면 오라클 추정량의 MSE가 c₀ n^{-2β/(2β+2)} 으로 수렴함을 증명한다. 이는 비국소 평균이 포아송 잡음에서도 최적 비편향 추정률을 달성한다는 의미이다. 정리 2는 실제 유사도 추정 b_ρₓ₀(x) =
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기