순환이 있는 2차원 유체 챕린 슬레잉의 운동
초록
본 논문은 순환을 포함한 포텐셜 흐름 속에서 비홀롱기 제약을 받는 평면 강체의 운동을 다룬다. 운동 방정식은 2차원 비선형 시스템으로 축소되며, 에너지 임계값에 따라 비정상적(수렴)과 주기적(진동) 궤도가 구분된다. 저자는 전체 궤적을 완전히 분류하고, 물체가 평면 위에 그리는 다양한 경로를 제시한다.
상세 분석
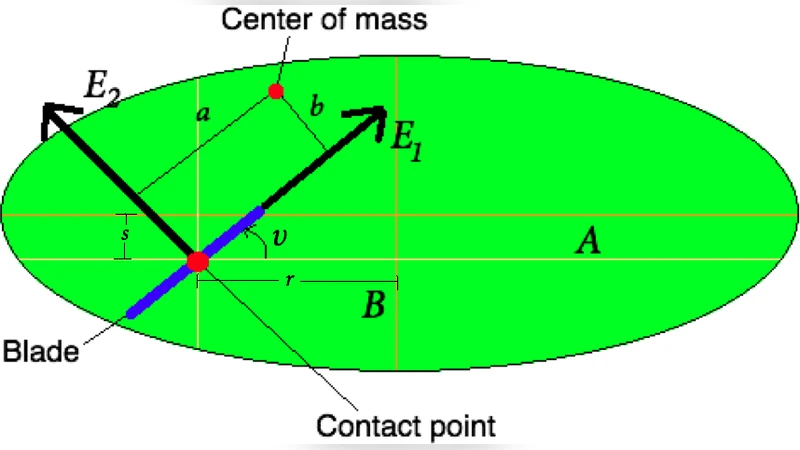
이 연구는 전통적인 챕린 슬레잉 모델에 순환 효과를 추가함으로써, 수중 로봇 설계에 직접적인 적용 가능성을 제시한다. 먼저, 강체가 잠수함과 같은 형태로 물속을 이동할 때 발생하는 비홀롱기 제약—즉, 특정 접선 방향으로의 속도 제한—을 수학적으로 정의한다. 이 제약은 라그랑지안에 라그랑주 승수를 도입함으로써 구현되며, 결과적인 운동 방정식은 라그랑주-다이아몬드 구조를 가진다.
포텐셜 흐름 가정 하에, 순환은 복소속도 잠재함수에 추가적인 항으로 나타나며, 이는 강체에 작용하는 추가적인 힘과 토크를 만든다. 저자는 이 힘을 정확히 계산하기 위해 복소 변수와 켈리-시뮬라스 이론을 활용한다. 특히, 순환 강도 Γ와 강체의 기하학적 파라미터(질량, 관성, 중심 위치) 사이의 상호작용이 비선형 항을 형성하여, 시스템을 2차원 위상 평면으로 축소한다.
축소된 시스템은 두 개의 상태 변수(선형 속도와 각속도)와 하나의 제약식으로 기술된다. 이때 에너지 보존 법칙이 존재하지만, 비홀롱기 제약 때문에 일반적인 해밀턴 구조는 깨진다. 대신, 비정상적인 고정점과 주기 궤도 사이에 임계 에너지 E_c가 존재한다는 것이 핵심 결과이다. E < E_c이면 해는 안정적인 고정점으로 수렴하며, 이는 물체가 일정한 방향으로 직선 이동 후 점차 정지하는 형태를 만든다. 반대로 E > E_c이면 해는 폐곡선을 따라 주기적으로 진동하며, 물체는 원형 혹은 타원형 궤적을 그리며 무한히 움직인다.
특히, 저자는 해석적 적분을 통해 해를 명시적으로 구한다. 이 과정에서 타원 적분과 로그 함수가 등장하지만, 적절한 변수 변환을 통해 닫힌 형태의 해를 얻는다. 또한, 위상 평면에서의 흐름을 그림으로 제시하여, 고정점의 종류(안정·불안정)와 주기 궤도의 존재 영역을 시각적으로 확인한다.
마지막으로, 물체의 실제 평면 궤적을 재구성한다. 선형 속도와 각속도의 시간 함수를 적분하여, 물체의 중심 좌표 (x(t), y(t))를 얻는다. 이때 순환 강도 Γ가 양수인지 음수인지에 따라 궤적이 좌우 대칭이 깨지며, 비대칭적인 나선형 또는 회전형 경로가 나타난다. 이러한 결과는 순환이 없는 전통적 챕린 슬레잉과는 근본적으로 다른 동역학을 보여준다.
요약하면, 논문은 순환이 포함된 2D 유체 환경에서 비홀롱기 제약을 받는 강체의 운동을 완전히 해석하고, 에너지에 따른 동역학적 전이와 궤적의 전형을 체계적으로 분류하였다. 이는 수중 로봇의 설계와 제어에 있어, 순환 효과를 고려한 새로운 전략을 제시하는 중요한 이론적 토대가 된다.