엘피 제약 최소제곱을 위한 투사 경사 하강법의 통합 분석
초록
본 논문은 압축 센싱에서 등장하는 ℓₚ(0 ≤ p ≤ 1) 제약 최소제곱 문제를 풀기 위한 투사 경사 하강법(PGD)의 수렴 특성을 RIP(Restricted Isometry Property) 기반으로 전 범위에 걸쳐 분석한다. p가 0일 때는 Iterative Hard Thresholding(IHT), p가 1일 때는 Iterative Soft Thresholding(IST)와 동일함을 보이며, p가 증가할수록 정확성을 보장하기 위한 RIP 조건이 강화되고 잡음에 대한 강인성이 약화됨을 이론적으로 증명한다.
상세 분석
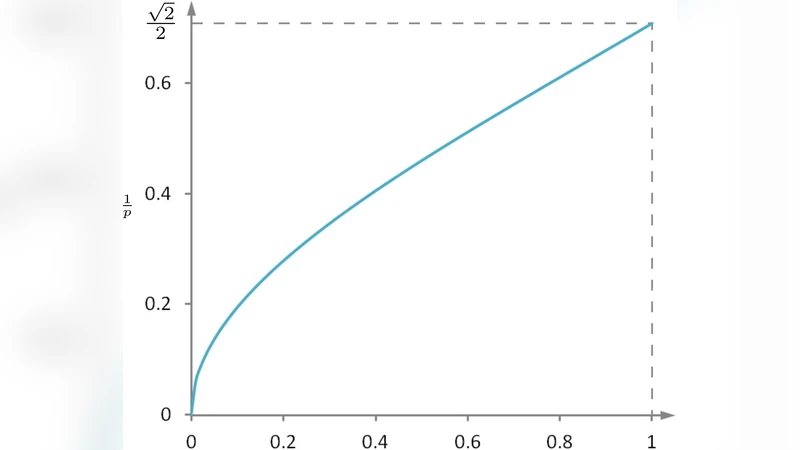
논문은 먼저 압축 센싱에서 흔히 사용되는 ℓₚ-제약 최소제곱 모델을 정의하고, 이를 해결하기 위한 일반적인 투사 경사 하강법(PGD) 프레임워크를 제시한다. PGD는 목표 함수 f(x)=½‖Ax−y‖₂²와 ℓₚ-볼(반경 b_c)이라는 비볼록(또는 볼록) 제약 집합 Q를 결합한다. p∈(0,1] 구간에서는 Q가 비볼록이므로 전통적인 수렴 분석이 적용되지 않으며, 저자들은 RIP의 비대칭 형태(α_s,β_s)를 이용해 새로운 수렴 조건을 도출한다. 핵심은 ρ_s = (α_s−β_s)/(α_s+β_s) 라는 스칼라를 정의하고, 이를 통해 수렴 계수 γ = ((1+τ)ρ_{3s}+τ) / (1+√2 ξ(p))² 를 얻는다. 여기서 ξ(p)=√p·√(2−p)−½−1/p 은 p에 대한 함수로, p가 커질수록 ξ(p)와 함께 수렴 조건(9)의 우변이 감소함을 보여준다. 즉, p가 0에 가까울수록 완화된 RIP 조건(예: δ_{3s}<½)만으로도 수렴이 보장되지만, p=1에서는 δ_{3s}<1/8 정도의 더 엄격한 조건이 필요하다.
또한, 단계 크기 η_k에 대한 자유도 τ를 도입해 실제 구현 시 알 수 없는 최적 η_k 대신 보수적인 범위(α_{3s}≤1/η_k≤β_{3s})를 허용한다. τ가 작을수록 ρ_{3s}에 대한 요구가 완화되고, 최종 오류식(10)에서 잡음 항 ‖e‖₂와 ε(제약 집합과 이상적인 ℓₚ-볼 사이의 차이)만이 남는다. ε=0이면 알고리즘은 잡음 수준에 비례하는 최적 오차에 수렴한다는 점을 강조한다.
정리 2.1은 정확히 s-희소 신호 x에 대해 3s-RIP를 만족하는 행렬 A와 적절한 p-반경 b_c=(1−ε)^{1/p}‖x‖p 를 사용하면, k번째 반복점 x_k가 (10)에 제시된 상한 이하로 수렴함을 보인다. 이는 기존 IHT와 IST에 대한 결과를 특수 경우로 포함한다. 특히, IHT에 대한 기존 δ{3s}<½ 조건과 일치하고, IST에 대해서는 처음으로 δ_{3s}<1/8 조건을 제시한다.
마지막으로, 거의 희소(approximate sparse) 신호에 대한 확장과, ε와 τ가 0이 아닐 때 발생하는 추가 오차 항을 상세히 분석한다. 논문은 이러한 이론적 결과가 실험적 위상 전이 현상과도 일치함을 언급하며, p가 커질수록 측정 행렬에 대한 요구가 강화되고 잡음에 대한 내성이 감소한다는 직관적 결론을 도출한다.
댓글 및 학술 토론
Loading comments...
의견 남기기