DiaSpec 로 로봇 시스템 설계와 구현: 장점과 한계
초록
본 논문은 Sense/Compute/Control(SCC) 패턴을 기반으로 한 로봇 애플리케이션을 DiaSpec 도메인‑특화 설계 언어와 컴파일러를 이용해 설계·구현한 사례를 제시한다. 설계 단계에서 컴포넌트를 센서·컨텍스트·제어·액추에이터 네 계층으로 분해하고, DiaSpec 선언을 통해 자동으로 Java 프레임워크를 생성한다. 구현자는 생성된 추상 클래스를 상속해 로직을 채우면 된다. 실험을 통해 재사용성·구조적 명확성 등 장점을 확인했지만, 로봇 미들웨어와의 결합, 데이터 타입 매핑 복잡성 등 한계도 드러났다.
상세 분석
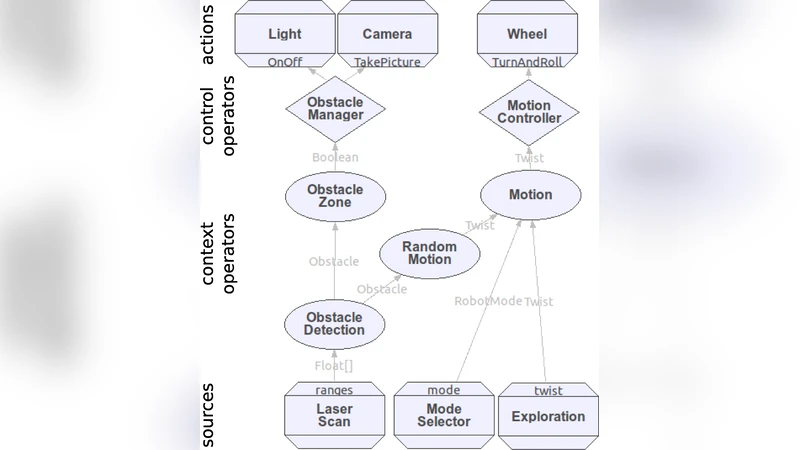
DiaSpec는 SCC 아키텍처를 정형화한 DSL로, 로봇 시스템에 적용할 경우 설계와 구현을 명확히 분리한다는 점이 가장 큰 강점이다. 먼저 로봇의 물리적 센서(레이저 스캔, 카메라 등)와 액추에이터(바퀴, 프로젝터)를 각각 ‘entity’로 선언하고, 이들로부터 얻은 원시 데이터를 ‘source’로 정의한다. 이후 데이터 정제와 의미 부여를 담당하는 ‘context operator’를 계층적으로 배치함으로써 복잡한 데이터 흐름을 단계별로 추상화한다. 예를 들어 장애물 탐지를 위한 ObstacleDetection 컨텍스트와, 모드에 따라 움직임을 결정하는 Motion 컨텍스트가 서로 독립적으로 구현될 수 있다.
컴파일러가 생성하는 추상 클래스는 각 컴포넌트별 인터페이스를 강제한다. 개발자는 오직 비즈니스 로직을 구현하는 메서드만 오버라이드하면 되므로, 설계 변경 시 자동으로 재컴파일된 프레임워크와의 호환성을 Java 컴파일러가 검증한다. 이는 코드 베이스가 설계와 일치하도록 유지하는 데 큰 도움이 된다.
하지만 로봇 분야 특유의 문제점도 존재한다. 첫째, ROS와 같은 고수준 미들웨어가 제공하는 복합 데이터 타입(Twist, Pose 등)을 그대로 재사용할지, DiaSpec 전용 타입을 새로 정의할지 결정해야 하는데, 선택에 따라 결합도와 재사용성이 크게 달라진다. 논문에서는 Twist는 ROS 타입을 그대로 사용하고, Obstacle은 새 구조체로 정의해 절충하였다. 둘째, 실시간 요구사항을 만족하기 위한 스케줄링이나 멀티스레딩 제어가 DiaSpec 프레임워크 수준에서 지원되지 않아, 개발자가 직접 ROS 노드와 Java 스레드 간의 동기화를 구현해야 한다. 셋째, DSL 자체가 로봇 특화 기능(예: SLAM, 경로 계획)에 대한 고수준 추상화를 제공하지 않으므로, 이러한 기능을 구현하려면 추가적인 컨텍스트 연산자를 설계해야 하는 부담이 있다.
이러한 한계를 보완하기 위해 논문은 (1) 미들웨어 타입 자동 매핑 도구, (2) 실시간 스케줄링 어노테이션, (3) 로봇 전용 고수준 연산자 라이브러리 추가 등을 제안한다. 전체적으로 DiaSpec는 로봇 시스템을 구조화하고 설계·구현 간 간극을 메우는 유용한 도구이지만, 로봇 특유의 복합 데이터와 실시간 제어 요구를 만족하려면 추가적인 확장이 필요함을 보여준다.
댓글 및 학술 토론
Loading comments...
의견 남기기