불확실성 속 가설 관리와 상황별 네트워크 구축
초록
**
본 논문은 다중 개체 베이지안 네트워크(MEBN)를 이용해 관측값과 엔터티 간의 연관 불확실성을 다루는 지식 기반 모델 구축 방법을 제시한다. 가설 관리(Hypothesis Management) 기법을 통해 정확도와 계산 복잡도 사이의 균형을 맞추고, 군용 차량 집단의 활동을 추론하는 실제 사례에 적용한다.
**
상세 분석
**
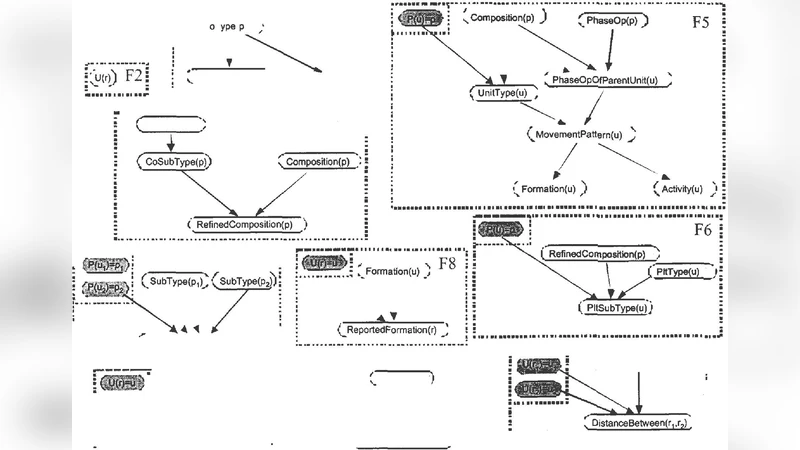
본 연구는 전통적인 베이지안 네트워크가 고정된 변수 집합을 전제로 하는 한계를 극복하고자, 다중 개체 베이지안 네트워크(MEBN)라는 프레임워크를 도입한다. MEBN은 “프래그먼트(fragment)”라 불리는 작은 베이지안 서브그래프들의 계층적 집합으로, 각각이 특정 개체 유형과 그 관계를 모델링한다. 이러한 구조는 엔터티 수와 관계가 사전에 정의되지 않은 동적 환경에서도 확률적 추론을 가능하게 한다.
핵심 난제는 **연관 불확실성(association uncertainty)**이다. 관측값(예: 레이더 혹은 정찰 보고)이 실제 어떤 개체에 해당하는지 모호할 경우, 전통적인 모델은 모든 가능한 매핑을 고려해야 하므로 조합 폭이 급격히 증가한다. 논문은 이를 “가설 관리”라는 절차로 formalize한다. 가설 관리 단계에서는 (1) 가설 생성 – 관측값과 기존 엔터티 사이의 가능한 연결을 모두 생성, (2) 가설 평가 – 각 가설에 대한 사전 확률과 증거를 이용해 후향 확률을 계산, (3) 가설 선택/제거 – 사전 정의된 비용-효율 기준에 따라 낮은 확률의 가설을 폐기하거나, 필요 시 새로운 가설을 추가한다.
이 과정에서 저자는 트레이드오프 모델을 제시한다. 정확성을 유지하기 위해서는 가능한 모든 가설을 유지해야 하지만, 이는 실시간 추론에 비현실적이다. 따라서, 가설의 우선순위 점수(예: 관측 신뢰도, 시간적 연속성, 공간적 근접성)를 정의하고, 일정 임계값 이하의 가설을 자동으로 제거한다. 이렇게 하면 모델 크기가 제한되고, 베이지안 추론 엔진이 효율적으로 동작한다.
구체적인 적용 사례로는 군용 차량 집단 인텔리전스가 있다. 정찰 보고는 차량 식별 번호, 위치, 속도 등의 불완전한 정보를 제공한다. MEBN은 “Vehicle”, “Platoon”, “Mission” 등 여러 프래그먼트를 정의하고, 각 보고를 해당 프래그먼트에 매핑한다. 가설 관리 알고리즘은 동일 차량에 대한 중복 보고를 통합하고, 보고 간의 시간적 간격을 이용해 이동 경로를 추정한다. 결과적으로, 특정 차량이 어느 부대에 속하는지, 현재 어떤 작전을 수행 중인지에 대한 확률적 추론이 가능해진다.
논문은 또한 추적 및 융합 분야의 기존 연구와 비교한다. 전통적인 다중 목표 추적(Multi‑Target Tracking)에서는 데이터 연관(Data Association) 문제를 해결하기 위해 JPDA(Joint Probabilistic Data Association)나 MHT(Multi‑Hypothesis Tracking)와 같은 기법을 사용한다. 그러나 이러한 방법은 주로 연속적인 센서 데이터에 초점을 맞추며, 복잡한 관계(예: 부대 구조, 임무 목표)까지는 모델링하지 못한다. 반면, 제안된 MEBN 기반 가설 관리는 관계형 정보를 자연스럽게 포함하고, 비정형 보고서(인간 정찰 보고 등)까지 확장 가능하다.
마지막으로, 실험 결과는 가설 관리가 연산 시간을 크게 감소시키면서도 추론 정확도는 기존 방법과 동등하거나 약간 우수함을 보여준다. 특히, 가설 수가 급증하는 상황에서도 적절한 폐기 정책을 적용하면 실시간 요구사항을 만족한다는 점이 강조된다.
**
댓글 및 학술 토론
Loading comments...
의견 남기기