입체보행 로봇을 위한 PSO 기반 역기구학 솔버
초록
본 논문은 입체 보행 로봇의 동적 모델링과 입자 군집 최적화(PSO)를 결합한 역기구학 솔버 IK‑PSO를 제안한다. 역전파 진자 모델을 이용해 중심질량(COM) 궤적을 사전 계산하고, 관절 제한과 안정성 기반 적합도 함수를 통해 COM 위치에 맞는 관절 각도를 PSO로 탐색한다. 실험 결과, 소형 이족 보행 로봇의 다리 움직임과 보행 계획에 성공적으로 적용되었다.
상세 분석
이 논문은 이족 보행 로봇의 제어 문제를 두 단계로 분리한다. 첫 번째 단계는 역전파 진자(Inverted Pendulum, IP) 모델을 이용해 로봇의 전역 동역학을 단순화하고, 목표 중심질량(COM) 궤적을 생성한다. IP 모델은 로봇을 질량이 집중된 점과 지면 사이의 단일 회전축으로 가정함으로써 복잡한 다관절 시스템을 2차원 평면 운동으로 축소한다. 이때 COM 위치는 로봇의 안정성을 판단하는 핵심 변수이며, 기존 연구에서 제시된 ZMP(Zero Moment Point) 혹은 FPE(Final Pendulum Energy)와 유사한 역할을 한다.
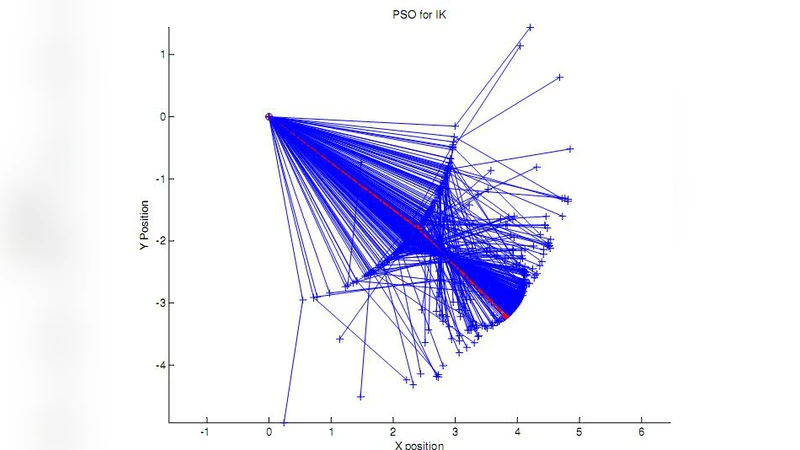
두 번째 단계에서는 PSO 기반 역기구학(IK‑PSO) 알고리즘을 설계한다. 여기서 입자 군집은 각 관절의 각도 벡터를 후보 해(solution)로 삼으며, 입자 위치는 관절 각도의 연속적인 값으로 표현된다. 논문은 관성 가중치(inertia weight) 변형 PSO를 채택해 탐색 초기에는 전역 탐색 능력을 강화하고, 반복이 진행될수록 수렴 속도를 높인다. 적합도 함수는 두 가지 주요 요소로 구성된다. 첫째, 후보 해가 사전에 계산된 COM 위치와의 거리 오차를 최소화하도록 설계된 거리 기반 항이다. 둘째, 각 관절의 물리적 제한(최대·최소 각도, 속도, 토크)과 충돌 방지를 위한 제약 항을 포함한다. 이 복합 적합도는 로봇이 실제 동작 중에 안정성을 유지하면서도 관절 구속을 위반하지 않도록 보장한다.
알고리즘 흐름은 다음과 같다. (1) IP 모델을 통해 목표 COM 궤적을 시간 이산화하여 샘플링한다. (2) 각 샘플 시점마다 IK‑PSO를 실행해 해당 COM에 도달할 수 있는 관절 각도 조합을 찾는다. (3) 최적화된 각도 시퀀스를 시간에 따라 연결해 연속적인 다리 궤적을 생성한다. 논문은 실험을 통해 입자 수, 최대 반복 횟수, 관성 가중치 감소 스케줄 등 파라미터가 최적화 성능에 미치는 영향을 정량적으로 분석한다. 특히 관성 가중치를 선형 감소시키는 것이 초기 탐색 다양성을 확보하고, 후반부에 빠른 수렴을 이루는 데 효과적임을 확인했다.
실제 적용 사례는 소형 2DOF(자유도) 다리 모델에 대한 시뮬레이션과 물리 실험이다. 목표 COM 궤적을 사전 정의한 뒤, IK‑PSO가 생성한 관절 각도 프로파일을 로봇에 적용했을 때, 발이 지면에 닿는 시점과 COM이 지지 다리 위에 머무르는 시점이 일치함을 보였다. 이는 전통적인 역기구학(예: Jacobian 기반) 방법에 비해 관절 제한을 자연스럽게 반영하면서도 안정성을 유지하는 장점을 보여준다. 또한, 복수의 보행 단계(보행 주기)를 연속적으로 연결함으로써 전역적인 보행 경로를 계획할 수 있음을 시연하였다.
이 연구의 주요 기여는 (1) 동적 안정성을 보장하는 COM 기반 목표 설정과 (2) 관절 제한을 포함한 복합 적합도 함수를 이용한 PSO 기반 역기구학 솔버를 결합함으로써, 기존 역기구학 방법이 갖는 수치적 불안정성 및 제약 위반 문제를 효과적으로 해결한 점이다. 향후 연구에서는 다관절 전신 모델, 비선형 토크 제한, 그리고 실시간 구현을 위한 GPU 가속 PSO 등으로 확장할 여지가 있다.