다목적 AI 플래닝: DAE‑YAHSP의 새로운 벤치마크 평가
초록
본 논문은 기존 단일 목표 플래너가 다목적 문제를 직접 다루지 못한다는 한계를 지적하고, 진화적 플래너인 Divide‑and‑Evolve(DAE)를 YAHSP와 결합해 다목적 버전을 구현한다. 이를 위해 목표 간 상충을 조절할 수 있는 튜너블 벤치마크를 설계하고, 여러 변형 DAE‑YAHSP를 실험하여 성능을 비교한다. 결과는 다목적 플래닝 연구에 실용적인 테스트베드와 알고리즘 평가 기준을 제공한다.
상세 분석
이 논문은 AI 플래닝 분야에서 다목적 최적화가 아직 초기 단계에 머물러 있다는 점을 명확히 제시한다. 기존 플래너들은 비용, 시간, 위험 등 여러 목표를 하나의 가중합으로 변환해 처리하지만, 이는 목표 간의 비선형 상호작용을 무시하게 된다. 저자들은 이러한 문제를 해결하기 위해 두 가지 핵심 아이디어를 도입한다. 첫째, 진화적 메타플래너인 Divide‑and‑Evolve(DAE)를 기반으로 하여, 문제를 작은 서브플랜으로 분할하고 각각을 기존 단일목표 플래너인 YAHSP에 맡긴다. DAE는 유전 연산자를 통해 서브플랜의 순서를 탐색하고, 전체 플랜의 품질을 평가한다. 둘째, YAHSP 자체는 단일 목표에 최적화돼 있지만, DAE 레이어에서 다목적 적합도 함수를 적용함으로써 다목적 진화가 가능하도록 만든다. 구체적으로, 두 개 이상의 목적(예: 총 비용과 총 소요 시간)을 동시에 고려하는 파레토 지배 기반 선택 메커니즘을 도입하였다.
벤치마크 설계는 또 다른 중요한 공헌이다. 저자들은 기존 플래닝 벤치마크가 다목적 특성을 결여하고 있음을 지적하고, 목표 간 상충 정도를 조절할 수 있는 파라미터를 포함한 인공적인 문제 집합을 제안한다. 예를 들어, 작업 간 선행 관계와 자원 제한을 유지하면서도 비용과 시간 사이의 트레이드오프를 명시적으로 설정한다. 이러한 튜너블 특성은 알고리즘이 다양한 난이도와 상충 강도에서 어떻게 행동하는지를 정량적으로 평가할 수 있게 한다.
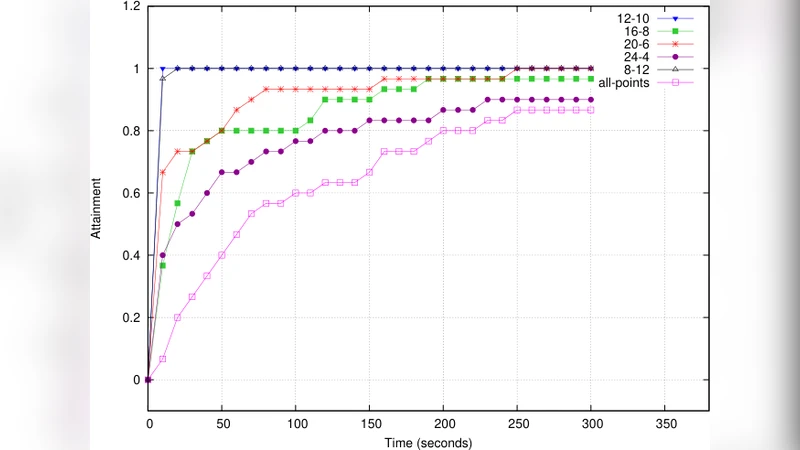
실험에서는 DAE‑YAHSP의 여러 변형(예: 다양한 교차·돌연변이 연산자, 파레토 정렬 방식, 목표 가중치 조정)을 비교한다. 결과는 파레토 전선의 밀도와 다양성, 그리고 수렴 속도 측면에서 차이를 보이며, 특히 파레토 기반 선택과 다중 목표 교차 연산자를 결합한 변형이 가장 우수한 성능을 나타냈다. 또한, 단일 목표 플래너를 단순히 가중합으로 사용한 경우와 비교했을 때, 다목적 DAE‑YAHSP는 목표 간 균형을 더 잘 유지하면서도 전체 플랜 품질을 크게 향상시켰다.
논문의 한계로는 아직 실세계 복잡한 도메인(예: 로봇 물류, 항공 스케줄링)에서의 적용 사례가 부족하고, YAHSP 자체가 단일 목표에 최적화돼 있기 때문에 다목적 목표를 직접 다루는 플래너와 비교했을 때 계산 비용이 다소 높을 수 있다는 점을 들 수 있다. 향후 연구에서는 YAHSP를 다목적 버전으로 개조하거나, 다른 단일 목표 플래너와의 결합을 탐색함으로써 확장성을 검증할 필요가 있다. 전반적으로 이 논문은 다목적 AI 플래닝을 위한 실험적 기반을 마련하고, 진화적 메타플래너와 기존 플래너의 시너지를 보여준 중요한 시도라 할 수 있다.