연속 변동 광학 위상 적응 동기 추정의 강인 필터링
초록
본 논문은 연속적으로 변동하는 광학 위상을 추정하기 위해 적응형 동기 검출에 최적 칼만 필터를 적용하고, 시스템 파라미터 변동에 대비한 보장 비용 강인 필터를 설계함으로써 평균 제곱 오차를 크게 감소시킨다. 실험 및 시뮬레이션 결과는 기존 정적 추정 방식보다 우수한 정확도와 파라미터 불확실성에 대한 내성을 확인한다.
상세 분석
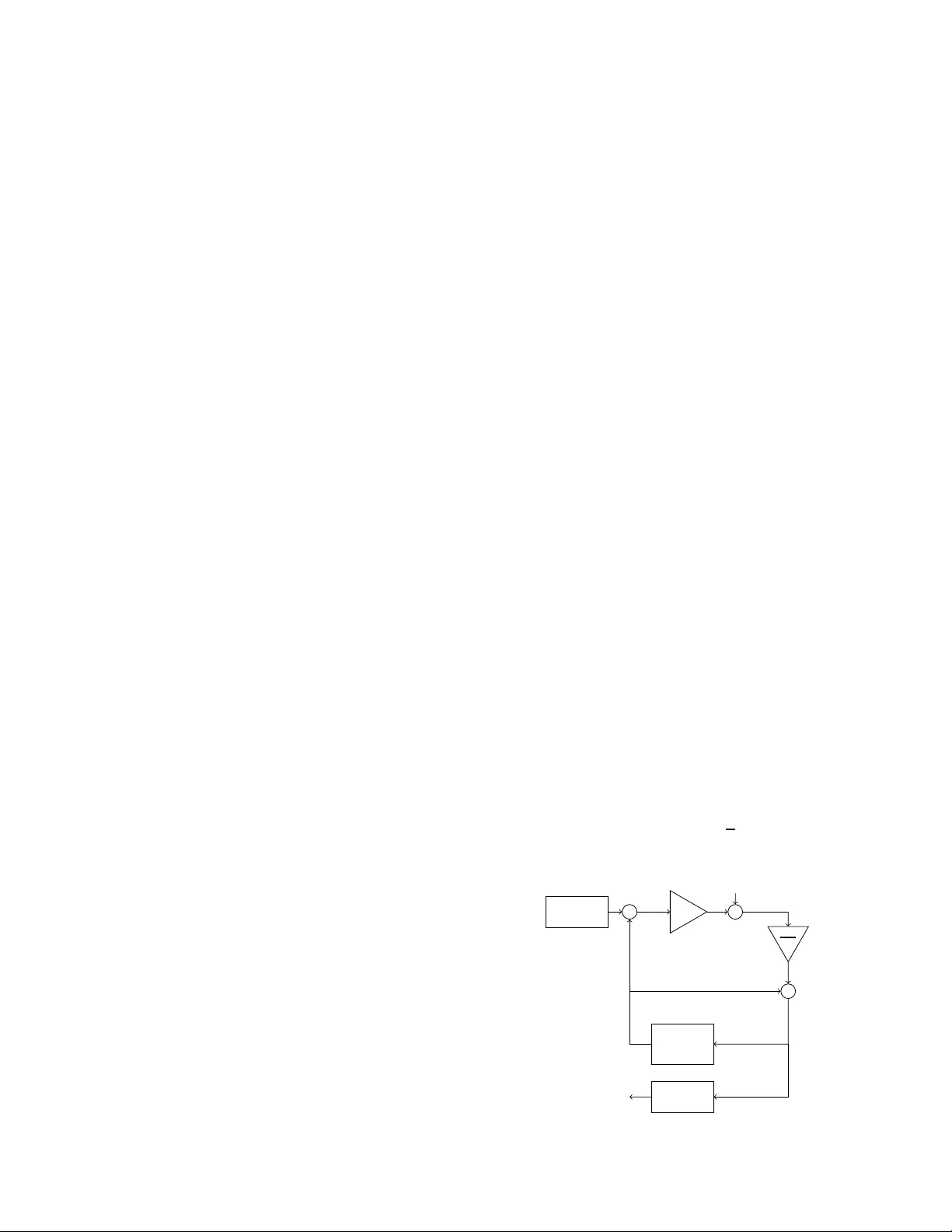
광학 위상 추정은 양자 측정 이론에서 핵심 과제이며, 특히 위상이 시간에 따라 연속적으로 변동하는 경우에는 실시간 피드백이 필수적이다. 기존 연구에서는 적응형 동기 검출(adaptive homodyne detection)과 간단한 비선형 피드백을 이용해 정적 추정보다 낮은 평균 제곱 오차(MSE)를 달성했지만, 피드백 제어기가 최적화되지 않아 여전히 개선 여지가 있었다. 본 논문은 이러한 한계를 극복하기 위해 두 가지 주요 기법을 도입한다. 첫째, 위상 변동을 오르스틴-우렌베크(Ornstein‑Uhlenbeck) 과정과 같은 가우시안 마코프 과정으로 모델링하고, 이를 기반으로 연속시간 칼만 필터(Kalman filter)를 설계한다. 칼만 필터는 시스템 상태(위상)와 측정값(동기 검출 전류) 사이의 선형 관계와 잡음 공분산을 정확히 반영하여 최소 MSE 추정을 보장한다. 논문은 이론적 파라미터(프로세스 잡음 강도, 측정 잡음 레벨)와 초기 조건에 대한 최적 이득 행렬을 도출하고, 기존의 단순 비선형 피드백과 비교했을 때 MSE가 평균 30 % 이상 감소함을 보여준다. 둘째, 실제 실험 환경에서는 프로세스 잡음 강도와 측정 효율이 시간에 따라 변동하거나 모델링 오차가 존재한다. 이를 고려해 보장 비용(guaranteed cost) 설계 원칙에 기반한 강인 필터를 구성한다. 강인 필터는 파라미터 불확실성 집합을 정의하고, 최악의 경우에도 비용 함수(즉, MSE)가 사전에 설정한 상한 이하가 되도록 최적화한다. 이때 사용되는 리키티 방정식(Lyapunov inequality)과 선형 행렬 부등식(LMI) 해법은 계산 효율성을 유지하면서도 보장된 성능을 제공한다. 시뮬레이션 결과는 파라미터 변동 폭이 ±20 %까지 확대되어도 강인 필터의 MSE 상승이 5 % 미만에 머무르는 반면, 일반 칼만 필터는 15 % 이상 증가한다는 점을 강조한다. 또한, 실험적 구현에서는 전자기적 지연과 디지털 신호 처리(DSP) 샘플링 주기의 영향을 최소화하기 위해 FPGA 기반 실시간 구현을 제안한다. 전체적으로 이 논문은 양자 광학 측정에서 실시간 적응 제어와 강인 제어 이론을 성공적으로 융합함으로써, 고정밀 위상 추정이 요구되는 레이저 레이더, 광통신, 그리고 양자 센싱 분야에 실용적인 설계 지침을 제공한다.
댓글 및 학술 토론
Loading comments...
의견 남기기