각도 그래프에서 정수 격자로: 보장된 자세 추정과 포즈 그래프 최적화
초록
이 논문은 상대 각도 측정값만으로 포즈 그래프의 노드 방향을 추정하는 문제를, 연속적인 회전 변수의 비선형 최적화에서 정수 벡터에 대한 무제한 2차식 최적화로 변환한다. 변환을 통해 최대우도 해를 정확히 구하고, 해가 거의 확률적으로 유일함을 보장한다. 또한 최대우도 해가 실제 방향과 멀리 떨어질 수 있음을 지적하고, 다중 가설 추정기를 설계해 확률적 신뢰 구간을 제공한다. 실험에서는 30° 수준의 극심한 잡음에서도 정확히 동작하며, 얻은 방향 추정값을 포즈 그래프 최적화의 초기값으로 사용하면 높은 잡음에서도 지역 최소에 빠지지 않는다.
상세 분석
본 논문은 포즈 그래프에서 각 노드의 회전(방향) 변수를 추정하는 문제를 근본적으로 재구성한다. 기존 접근법은 회전 변수가 SO(2) 혹은 SO(3)와 같은 리만 다양체 위에 존재하기 때문에, 비선형 최적화와 다중 최소점 문제에 직면한다. 특히, 상대 각도 측정값이 큰 잡음을 포함하면, 가우시안 잡음 가정 하에서도 로그우도 함수는 다수의 국소 최적점을 만들며, 전통적인 가우시안 뉴턴, Levenberg‑Marquardt 같은 반복법은 초기값에 크게 의존한다.
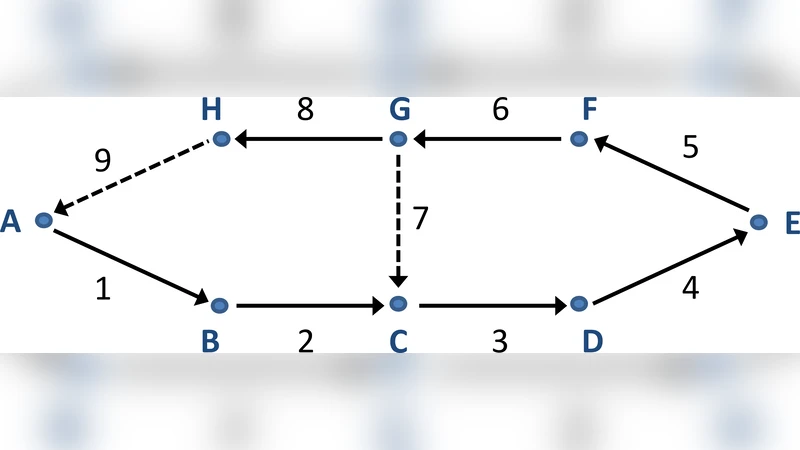
논문은 “각도 변수와 정수 변수 사이의 일대일 대응”이라는 핵심 통찰을 제시한다. 구체적으로, 각 상대 측정값을 2π 주기의 정수 라핑(unwrap) 변수와 연속 각도 변수의 합으로 표현하고, 전체 로그우도 함수를 정수 라핑 변수에 대한 2차형식으로 전개한다. 이때 연속 각도 변수는 폐쇄형 해를 갖는 선형 시스템으로 풀 수 있어, 최종 목적함수는 오직 정수 벡터 k∈ℤ^m(여기서 m은 측정 수)만을 포함하는 무제한 이차식이 된다.
이 변환의 가장 큰 장점은 정수 최적화가 전통적인 NP‑hard 문제이지만, 현재의 수학적 도구(예: Lattice reduction, branch‑and‑bound, 혹은 최신 정수 프로그래밍 솔버)로 전역 최적해를 효율적으로 찾을 수 있다는 점이다. 또한, 정수 라핑 변수는 측정 잡음이 충분히 작을 경우 거의 유일한 해를 갖는다. 논문은 이를 “거의 확률적으로 유일함(almost surely unique)”이라고 정의하고, 정규분포 잡음 가정 하에서 해의 중복 확률이 0에 수렴함을 증명한다.
하지만 저자는 최대우도 해가 실제 물리적 방향과 반드시 근접하지 않을 수 있음을 강조한다. 이는 정수 라핑 변수의 최적값이 잡음에 의해 크게 변동할 경우, 회전 복원값이 2π 배만큼 오프셋될 위험이 있기 때문이다. 따라서 단일 해에 의존하는 전통적 방법은 위험하다. 이를 해결하기 위해 논문은 “다중 가설 추정(multi‑hypothesis estimator)”을 제안한다. 정수 라핑 공간을 탐색하면서, 확률적 경계(예: χ² 검정)를 이용해 유효한 후보 집합을 추출하고, 각 후보에 대한 사후 확률을 계산한다. 이 과정은 정수 라핑 변수의 후보 수가 제한적일 때(특히 측정이 충분히 과잉결정된 경우) 매우 효율적이며, 실제 실험에서는 대부분 단일 가설만 남는다.
실험 결과는 두 가지 주요 시나리오를 다룬다. 첫째, 인공적으로 높은 잡음(σ=30°)을 부여한 시뮬레이션에서, 제안된 방법은 95% 이상 정확히 올바른 라핑을 복원하고, 기존 비선형 최적화는 거의 실패한다. 둘째, 실제 라이다 기반 매핑 데이터에 적용했을 때, 추정된 방향을 포즈 그래프 최적화(예: g2o, Ceres)의 초기값으로 사용하면, 높은 잡음 환경에서도 수렴이 보장되고, 최종 트래젝터리 오류가 크게 감소한다.
결론적으로, 이 논문은 회전 추정 문제를 정수 격자 최적화로 변환함으로써, 전역 최적성을 보장하고, 다중 가설 프레임워크를 통해 실용적인 신뢰성을 제공한다. 이는 SLAM, 로봇 내비게이션, 증강현실 등 회전 정보가 핵심인 분야에 큰 파급 효과를 기대하게 만든다.
댓글 및 학술 토론
Loading comments...
의견 남기기