물리학이 이끄는 도약 혁신
초록
본 논문은 물리학 원리를 체계적으로 적용해 장거리 뛰기(Long Jump)의 기술적 한계를 극복하고 성능을 향상시키는 방법을 제시한다. 고점프 플롭 스타일에서와 같이 중심질량(CM)의 위치와 비행 궤적을 최적화함으로써 착지 거리를 최대화하는 전략을 논의한다.
상세 분석
장거리 뛰기는 ‘속도‑각도‑시점’이라는 세 가지 핵심 변수의 복합적 최적화가 요구되는 복합운동이다. 기존 코치들은 주로 경험적 감각에 의존해 출발 가속도와 착지 자세를 조정했지만, 물리학적 모델을 적용하면 보다 정량적인 설계가 가능하다. 첫 번째로, 운동선수의 질량 중심(CM)은 출발 직후부터 비행 단계까지 일정한 궤적을 그리며, 이 궤적이 지면과 이루는 각도가 이론적으로 45°에 가까울수록 수평거리(거리)와 수직고도가 균형을 이루어 최적의 비행 거리를 만든다. 그러나 실제 인간은 근육의 힘-속도 곡선과 관절 가동범위 제한으로 인해 45°보다 낮은 각도가 선호된다. 논문은 이를 보완하기 위해 ‘가속-점프-전환’ 3단계 모델을 제시한다.
① 가속 단계에서는 최대 지면 반작용력(N)과 최소 접지시간(Δt)을 동시에 달성해야 하며, 이는 ‘스프린트 파워’(P = F·v) 개념으로 정량화된다. 고속 스프린트 시 근육 섬유가 빠르게 수축하면서 발생하는 피크 파워는 출발선에서 2~3 m까지의 구간에 집중 배치한다.
② 점프 단계에서는 ‘플롭’과 유사하게 몸을 뒤로 회전시켜 CM을 착지점보다 앞쪽에 두는 것이 핵심이다. 고점프에서 CM이 바 위에 있을 때와 마찬가지로, 장거리 뛰기에서도 비행 중 CM이 착지점 바로 앞에 위치하면 착지 시 충격을 최소화하면서도 수평 이동 거리를 늘릴 수 있다. 이를 위해 무릎과 엉덩이 관절을 과도하게 신전시키는 ‘역방향 플롭’ 동작을 도입한다.
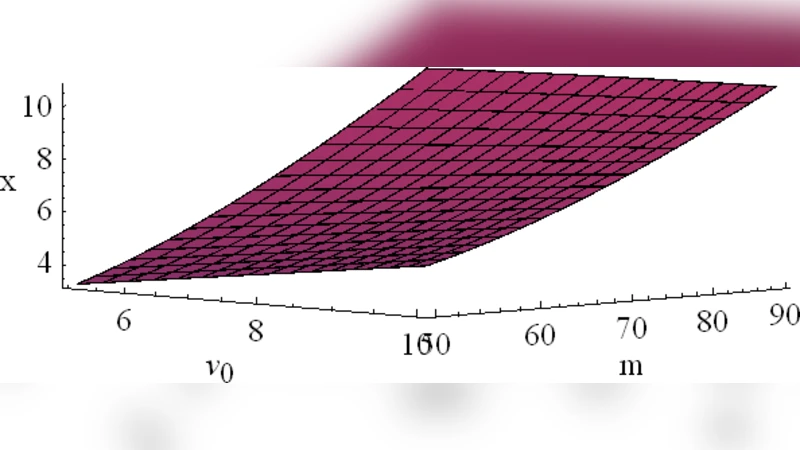
③ 전환 단계에서는 공기 저항과 중력 가속도(g)를 고려한 ‘최적 비행 궤도’를 설계한다. 공기 저항은 속도 제곱에 비례하므로, 초기 속도가 높을수록 저항 손실이 급격히 증가한다. 따라서 초기 속도를 9.5 m/s 정도로 제한하고, 비행 각도를 38~42° 사이로 조정하면 저항 손실을 최소화하면서도 충분한 수평 이동을 확보한다.
수학적으로는 초기 속도(v₀), 발사 각도(θ), 비행 시간(t) 사이에 다음 관계가 성립한다.
\