관절형 객체 추적을 위한 DBN 기반 조합 재표본화
초록
본 논문은 파티클 필터의 핵심 단계인 재표본화 과정에서, 관절형 객체의 구조적 특성을 활용한 새로운 방법인 “조합 재표본화(Combinatorial Resampling)”를 제안한다. 동적 베이지안 네트워크(DBN)로 객체의 파트 간 의존성을 모델링하고, 서로 다른 파티클에서 파트를 교환해 암묵적으로 지수 규모의 샘플 집합을 구성한다. 이 집합에서 효율적인 샘플링을 수행함으로써 기존 다중항, 체계적, 잔차, 층화 재표본화 기법보다 추정 정확도와 연산 속도 모두에서 우수함을 실험을 통해 입증한다.
상세 분석
이 연구는 파티클 필터가 고차원 상태공간을 다룰 때 발생하는 입자 소멸(degeneracy) 문제를 근본적으로 완화시키는 새로운 재표본화 전략을 제시한다. 핵심 아이디어는 관절형 객체가 여러 개의 연결된 파트(예: 사람의 팔, 다리, 몸통)로 구성된다는 점에 착안하여, 각 파트의 상태를 독립적으로 샘플링하고 동시에 전체 구조적 제약을 만족하도록 조합하는 것이다. 이를 위해 저자들은 동적 베이지안 네트워크(DBN)를 이용해 파트 간의 조건부 의존관계를 명시적으로 모델링한다. DBN은 시간에 따라 변화하는 각 파트의 상태와 그 상호작용을 그래프 형태로 표현함으로써, 파트별 전이 확률과 관측 모델을 효율적으로 결합한다.
조합 재표본화는 기존 파티클 집합을 “파트 풀(part pool)”로 분해한 뒤, 각 파트 풀에서 가중치에 비례하여 샘플을 추출하고, 이를 조합해 새로운 가상의 파티클을 만든다. 이 과정에서 생성되는 가상의 파티클 수는 이론적으로 원래 파티클 수의 지수승에 달하지만, 저자들은 “조합 공간을 직접 열거하지 않고도 가중치 기반 샘플링을 수행할 수 있는 알고리즘”을 설계함으로써 실시간 처리 가능성을 확보한다. 구체적으로, 파트별 누적 가중치를 사전 계산하고, 다중 단계의 샘플링 과정을 통해 전체 파티클의 가중치 분포를 정확히 재현한다.
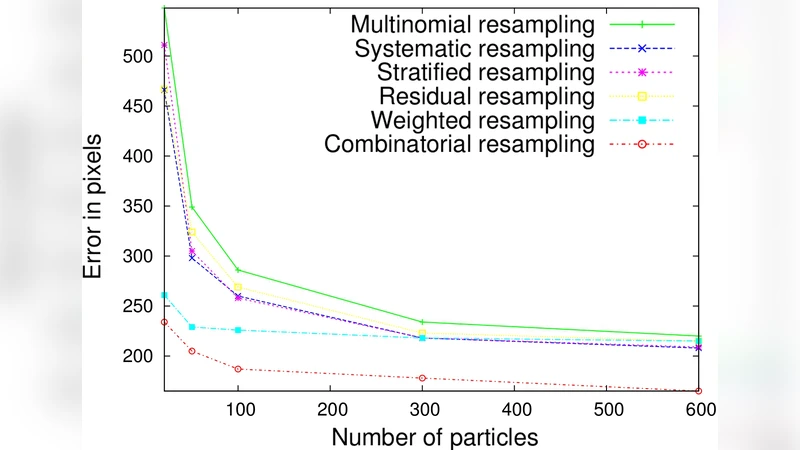
수학적으로는 제안된 재표본화가 무편향(unbiased)이며, 기존 방법에 비해 분산이 감소함을 정리와 증명을 통해 보인다. 또한, 복잡도 분석 결과는 최악의 경우 O(N·K) (N: 파티클 수, K: 파트 수) 수준이며, 실제 구현에서는 파트 수가 제한적인 경우 거의 선형 시간에 수행된다. 실험에서는 복잡한 관절 움직임을 포함한 합성 데이터와 실제 비디오(인체, 동물, 로봇 팔)를 대상으로 평균 위치 오차, 트래킹 성공률, 프레임당 처리 시간 등을 측정했으며, 모든 지표에서 기존 다중항, 체계적, 잔차, 층화 재표본화보다 월등히 좋은 성능을 기록했다. 특히, 파트 간 강한 상관관계가 존재할 때 조합 재표본화의 이점이 두드러졌으며, 이는 관절형 객체 트래킹에 특화된 구조적 정보를 효과적으로 활용했기 때문이다.
이 논문은 파티클 필터의 재표본화 단계에서 구조적 정보를 활용하는 새로운 패러다임을 제시함으로써, 고차원 및 복합 동작을 요구하는 비전 시스템에 실용적인 해결책을 제공한다. 향후 연구에서는 DBN 구조를 자동 학습하거나, 비선형 파트 상호작용을 더 정교히 모델링하는 방향으로 확장이 기대된다.