다수의 두꺼운 모바일 로봇을 평면에 모으는 분산 알고리즘
초록
본 논문은 비투명 단위 원판 형태의 ‘두꺼운’ 로봇들이 비동기식 비전 전용 환경에서 서로를 관찰하며, 모든 로봇이 한 점에 모이는(gathering) 문제를 해결한다. 로봇들은 상태기계 기반 로컬 결정을 통해, 결국 모든 로봇의 중심이 볼록 껍질을 이루고 서로 시야가 확보되며 접촉을 통해 연결된 형태에 도달하고 종료한다.
상세 분석
이 연구는 기존의 점 로봇(gathering) 문제를 확장하여, 반투명성이 없고 물리적 부피를 가진 단위 원판 형태의 ‘fat robot’ 모델을 채택한다. 로봇은 크기 때문에 충돌 회피와 접촉을 통한 연결성 보장이 핵심 난제이며, 비동기식(ASYNC) 스케줄링 하에서 각 로봇은 독립적인 ‘Look‑Compute‑Move’ 사이클을 수행한다. 통신 수단이 전혀 없고 시야만이 유일한 협업 매개체이므로, 로봇은 자신이 관찰한 전체 배치를 기반으로 상태 전이를 결정한다. 논문은 이를 위해 유한 상태 기계(state‑machine) 모델을 정의하고, 각 상태에서 수행할 움직임 규칙을 명시한다.
알고리즘의 핵심 아이디어는 세 가지 전역 속성을 동시에 만족하는 ‘목표 구성(configuration)’에 도달하는 것이다. 첫째, 모든 로봇 중심이 볼록 껍질(convex hull)의 꼭짓점에 위치하도록 하여, 내부에 빈 공간이 없게 만든다. 둘째, 각 로봇이 모든 다른 로봇을 시야에 포함하도록 전역 가시성(global visibility)을 확보한다. 셋째, 물리적 접촉을 통해 전체 로봇 집합이 하나의 연결 그래프를 형성하도록 한다(연결성).
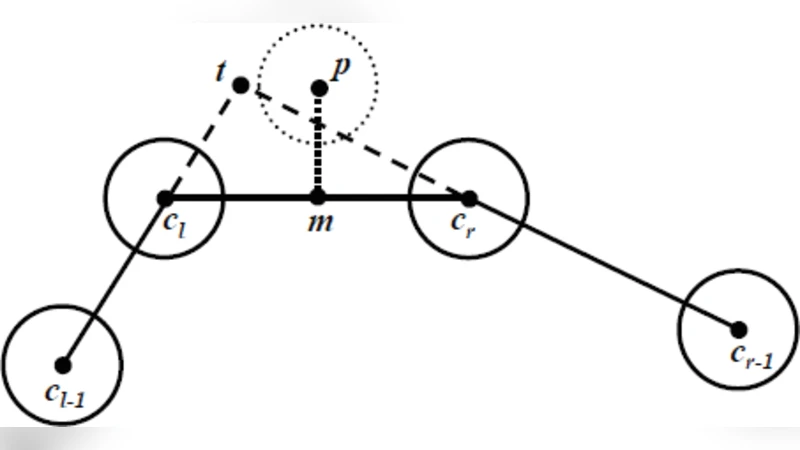
알고리즘은 크게 두 단계로 나뉜다. 초기 단계에서는 로봇들이 서로 겹치지 않도록 충분히 멀리 떨어진 위치로 이동하면서, 볼록 껍질을 형성하도록 유도한다. 이때 로봇은 자신의 현재 위치와 주변 로봇들의 상대적 위치를 계산해, 가장 바깥쪽에 있는 로봇이 껍질을 확장하거나 수축시키는 역할을 수행한다. 두 번째 단계에서는 이미 볼록 껍질 위에 있는 로봇들이 서로를 향해 이동하면서, 시야를 확보하고 동시에 접촉을 만들도록 설계된 ‘접촉‑가시성 강화’ 움직임을 수행한다. 비동기식 스케줄링으로 인해 일부 로봇은 오래 대기하거나, 다른 로봇이 이미 움직인 뒤에 관찰할 수 있다. 이를 해결하기 위해 상태 전이 조건에 ‘안전 구역(safe region)’ 개념을 도입해, 어느 로봇이 움직이더라도 기존의 볼록 껍질 구조와 연결성이 깨지지 않도록 보장한다.
정합성(proof of correctness) 부분에서는, (1) 볼록 껍질 유지, (2) 전역 가시성 달성, (3) 연결성 유지라는 세 가지 불변식(invariant)이 알고리즘 전 과정에서 유지됨을 수학적으로 증명한다. 특히, 두 로봇이 동시에 움직일 경우 발생할 수 있는 충돌을 방지하기 위해, 로봇이 이동할 경로를 ‘원판 내부가 아닌 외부 영역’으로 제한한다. 또한, 비동기식 실행에서도 무한 대기(livelock)나 영원한 진동(oscillation)이 발생하지 않도록, 각 로봇이 진행할 수 있는 최대 이동 거리를 점진적으로 감소시키는 ‘감쇠 메커니즘(damping)’을 도입한다. 최종적으로 모든 로봇이 동일한 좌표에 수렴하고, 그 순간 각 로봇은 ‘종료 상태(terminate)’에 진입함을 보인다.
이 논문은 기존 점 로봇 연구와 달리 물리적 부피와 비투명성을 고려한 현실적인 로봇 시스템에 적용 가능함을 보여준다. 또한, 비동기식 비전 전용 환경에서도 완전한 수렴을 보장하는 최초의 분산 알고리즘으로, 향후 다중 로봇 협업, 무인 물류, 탐사 로봇 등에 대한 이론적 기반을 제공한다.