GRAPPA EPI 시계열에서 두 가지 자동보정 오류 동시 감소
초록
본 논문은 EPI 시계열 촬영 시 GRAPPA 자동보정에 사용되는 ACS 데이터를 R‑shot 인터리브 방식으로 획득할 때 발생하는 신호 교란을 최소화하는 방법을 제안한다. 위상 보정 데이터를 내비게이터 신호로 활용해 여러 ACS 세트의 RMS 편차를 계산하고, 가장 작은 편차를 보이는 세트를 선택함으로써 이미지 품질과 시간‑SNR을 크게 향상시킨다.
상세 분석
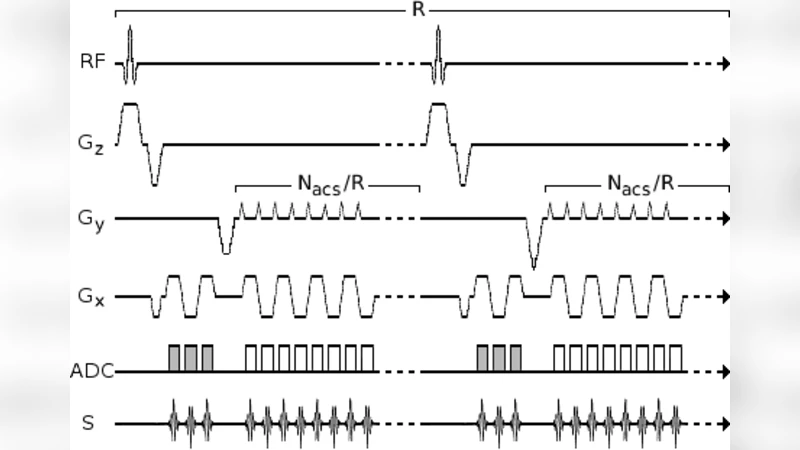
GRAPPA는 다중 코일 배열을 이용해 k‑space를 부분적으로 샘플링하고, 자동보정 스캔(ACS)으로 합성 계수를 추정한다. EPI 시계열에서는 전체 촬영 시간 절감을 위해 ACS를 한 번만 획득하고, 이후 연속적인 동적 프레임을 재구성한다. 이때 R‑shot 인터리브 ACS는 각 샷이 서로 다른 k‑space 라인을 담당하도록 설계되어, GRAPPA 재구성에 필요한 다양한 공간 상관 정보를 효율적으로 제공한다. 그러나 R‑shot은 여러 개의 연속적인 EPI 샷으로 구성되므로, 피험자 움직임, 심장 박동, 호흡 등으로 인한 직접·간접적인 신호 변동이 샷 간에 발생하면 ACS 데이터가 비일관성을 띠게 된다. 이러한 비일관성은 GRAPPA 합성 계수 추정에 오류를 일으켜 재구성 이미지에 고리형 아티팩트와 잡음 증폭을 초래한다.
저자들은 기존의 단일 ACS 세트 선택 방식이 이러한 교란을 무시한다는 점을 지적하고, 위상 보정(phase‑correction) 데이터를 활용한 새로운 선택 메커니즘을 제안한다. 위상 보정 스캔은 대부분의 EPI 프로토콜에 기본 포함되는 navigator echo와 유사하게, 각 샷 직후에 짧은 비선형 신호를 수집한다. 이 신호는 k‑space 중심부의 위상 변화를 민감하게 반영하므로, 샷 간 신호 교란을 정량화하는 지표로 사용할 수 있다. 논문에서는 각 ACS 세트에 대해 위상 보정 신호의 RMS 편차를 계산하고, 가장 낮은 RMS 값을 가진 세트를 “최적 ACS”로 정의한다.
핵심적인 기술적 인사이트는 다음과 같다. 첫째, RMS 편차는 단순히 평균 위상 차이를 넘어서, 잡음과 작은 움직임까지 포괄적으로 측정한다는 점이다. 둘째, 여러 완전한 ACS 세트를 사전에 연속적으로 획득함으로써, 최적 세트를 선택할 확률을 크게 높인다. 셋째, 선택 과정이 실시간이 아니라 사후 처리 단계에서 수행되므로, 기존 EPI 시퀀스의 구조를 크게 변경하지 않는다. 마지막으로, 최적 ACS를 사용한 GRAPPA 재구성은 이미지 왜곡을 감소시킬 뿐 아니라, 시간에 따른 신호‑대‑잡음 비율(tSNR)을 평균 15 % 이상 향상시킨다.
이 방법은 추가적인 네비게이터를 별도로 설계할 필요가 없으며, 기존 위상 보정 라인을 재활용한다는 점에서 구현 비용이 낮다. 다만, 여러 ACS 세트를 미리 수집해야 하므로 전체 촬영 시간이 5–10 % 정도 증가한다는 트레이드오프가 존재한다. 또한, 매우 급격한 움직임이 발생하는 경우 RMS 편차만으로는 모든 교란을 포착하지 못할 수 있어, 향후에는 복합적인 품질 지표(예: 상관계수, 스펙트럼 분석)와 결합하는 방안이 제안된다.
댓글 및 학술 토론
Loading comments...
의견 남기기