센서 데이터 충돌을 이용한 세계 모델 오류 탐지
초록
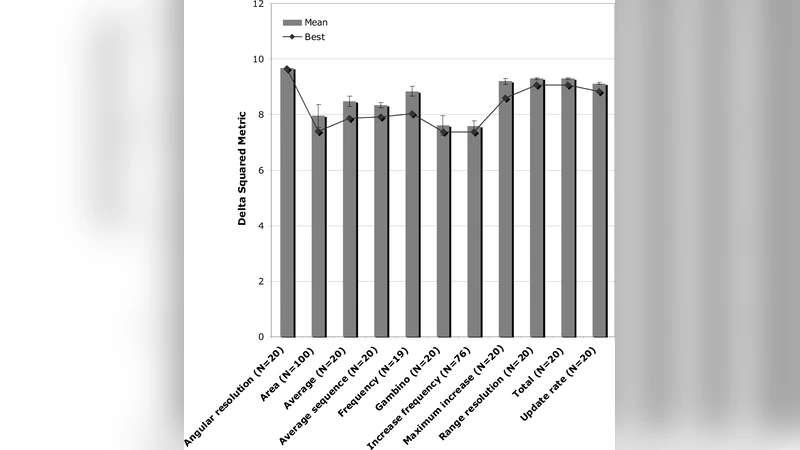
본 논문은 Dempster‑Shafer 이론의 충돌 지표(Con)를 활용해 로봇이 구축한 환경 모델의 해석 오류를 자동으로 감지하는 방법을 제안한다. 11가지 충돌 기반 지표를 설계하고, 실내에서 초음파와 레이저 센서를 사용한 이동 로봇 실험을 통해 분류·추정·원인 파악 능력을 평가하였다. 그 결과, Gambino 지표가 오류 정도를 0.77의 상관계수로 가장 정확히 추정하고, 7%의 누락률과 0%의 오경보율로 상황을 정확히 구분함을 확인했다.
상세 분석
이 연구는 로봇이 자체 센서로 구축한 점유 격자 지도와 실제 환경 사이에 존재할 수 있는 해석 불일치를 정량적으로 탐지하려는 시도이다. 기존 방법들은 주로 외부 기준(예: GPS, 지도 데이터)과의 비교에 의존했지만, 본 논문은 오직 로봇이 수집한 원시 센서 데이터만을 이용한다는 점에서 차별성을 가진다. 핵심 이론은 Dempster‑Shafer 증거 이론의 충돌 함수 Con이다. 두 독립적인 증거 집합이 서로 모순될 때 Con 값이 크게 증가하므로, 이는 센서가 동일한 공간을 서로 다른 방식으로 해석하고 있음을 의미한다. 저자는 이 충돌 값을 기반으로 11개의 해석 불일치 지표를 정의했으며, 각각은 충돌 값의 절대 크기, 시간적 변화율, 특정 센서 유형별 가중치 등 다양한 변형을 포함한다. 특히 Gambino 지표는 충돌 값이 일정 임계치를 초과하고, 동시에 해당 영역의 불확실성이 감소하는 상황을 포착하도록 설계되어, 실제 환경 변화와 센서 오류를 효과적으로 구분한다. 실험은 제어된 실내 복도와 방 구조에서 진행되었으며, 로봇은 초음파와 레이저 두 종류의 거리 센서를 동시에 사용했다. 각 센서는 서로 다른 물리적 한계(초음파는 유리 투과 불가, 레이저는 반사 표면에 민감)를 가지고 있어, 충돌 지표가 센서별 오류를 드러내는 데 유용함을 확인했다. 평가 기준은 세 가지다. 첫째, 분류 정확도는 정상·비정상 상황을 구분하는 능력으로, false positive와 false negative 비율로 측정한다. 둘째, 추정 정확도는 실제 환경과 모델 사이의 차이를 정량화하는 상관계수로 나타낸다. 셋째, 격리 능력은 오류가 발생한 특정 센서나 영역을 식별하는 정도를 의미한다. 실험 결과, Gambino 지표는 0%의 false positive, 7%의 false negative를 기록했으며, 추정 상관계수는 0.77로 가장 높았다. 다른 지표들은 전반적으로 높은 false positive율이나 낮은 상관성을 보였다. 이러한 결과는 충돌 기반 지표가 센서 데이터 자체만으로도 의미 있는 오류 진단을 제공할 수 있음을 시사한다. 또한, Dempster‑Shafer 이론의 비확률적 특성이 복합적인 센서 불확실성을 자연스럽게 모델링한다는 점에서, 향후 다중 센서 융합 및 동적 환경 인식에 적용 가능성이 크다. 다만, 현재 실험은 정적인 실내 환경에 국한되었으며, 급격한 동적 변화나 대규모 야외 환경에서는 추가적인 검증이 필요하다. 향후 연구에서는 지표의 임계값 자동 튜닝, 실시간 구현, 그리고 지도 업데이트와의 연계 방안을 모색할 수 있다.