지속 감시 최적 제어 접근법
초록
본 논문은 이동형 노드가 1차원 임무 공간을 순회하면서 불확실성 지표를 최소화하도록 제어하는 최적 제어 프레임워크를 제시한다. 다중 에이전트 경우 최적 해가 전환 위치와 해당 지점에서의 대기 시간으로 구성된 파라미터 집합으로 표현됨을 보이고, 무한소 섭동 분석(IPA)을 이용해 그래디언트 기반 최적화를 수행한다. 또한 실시간 근사 해를 제공하는 재귀적 호라이즌 제어 방안을 논의한다.
상세 분석
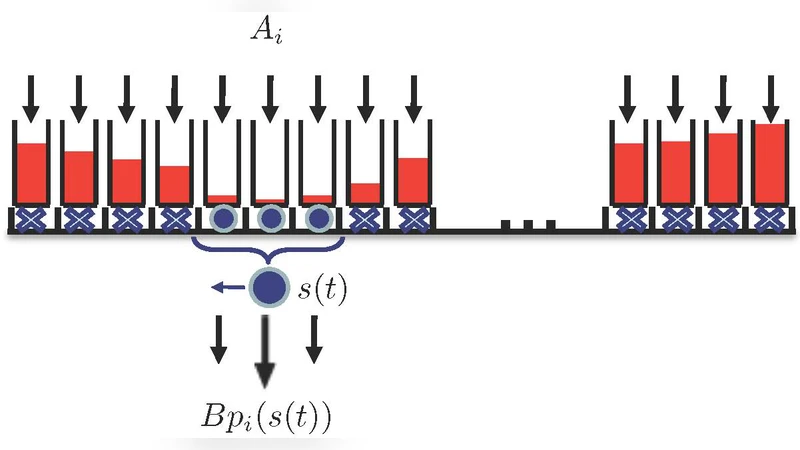
논문은 지속 감시(persistent monitoring) 문제를 연속적인 불확실성 감소 과정으로 모델링한다. 임무 공간을 1차원 구간으로 가정하고, 각 모바일 에이전트는 일정한 속도로 이동하며 센서 범위 내의 불확실성을 선형적으로 감소시킨다. 불확실성은 시간에 따라 자연적으로 증가하는 함수와 에이전트가 방문할 때 감소하는 함수의 합으로 정의되며, 전체 목표는 일정 기간 동안 누적된 불확실성(즉, 비용 함수)을 최소화하는 것이다.
핵심 아이디어는 최적 궤적이 ‘스위칭 포인트(switching locations)’와 그 지점에서의 ‘대기 시간(waiting time)’이라는 유한 차원의 파라미터로 완전히 기술될 수 있다는 점이다. 이는 전통적인 무한 차원 제어 문제를 파라메트릭 최적화 문제로 차원 축소시킨다. 저자는 변분 원리를 적용해 해가 구간 경계에서 연속적이면서도 미분가능한 구조를 가져야 함을 증명하고, 스위칭 포인트 사이에서는 에이전트가 최대 속도로 이동한다는 결론을 도출한다.
파라미터 최적화는 무작위 초기값에 민감한 전통적 방법보다 효율적인 무한소 섭동 분석(Infinitesimal Perturbation Analysis, IPA)을 사용한다. IPA는 시스템 파라미터가 미세하게 변할 때 비용 함수의 미분값을 직접 추정할 수 있게 해 주며, 이벤트 기반(전환 시점)으로 계산이 이루어지므로 시뮬레이션 비용이 크게 감소한다. 논문은 IPA 파생식을 상세히 유도하고, 이를 기반으로 스텝 사이즈 조정과 수렴 보장을 위한 그래디언트 하강 알고리즘을 제시한다.
또한 실시간 적용 가능성을 위해 재귀적 호라이즌(Receding Horizon) 제어 방식을 설계한다. 짧은 예측 구간을 설정하고 현재 상태에서 최적 스위칭 포인트와 대기 시간을 계산한 뒤, 첫 번째 결정만 실행하고 창을 한 단계 앞으로 이동한다. 이렇게 하면 전체 최적화 문제를 반복적으로 풀 필요 없이 근사 해를 지속적으로 갱신할 수 있다. 실험 결과는 제안된 IPA 기반 최적화가 전통적인 수치 최적화보다 빠르게 수렴하고, 재귀적 호라이즌 제어가 실시간 제어 요구를 만족시키면서도 전체 비용을 크게 감소시킴을 보여준다.
이러한 접근법은 다중 에이전트 협업, 비선형 센서 모델, 이산적 이벤트 발생 등 보다 복잡한 상황에도 확장 가능성이 높으며, 특히 무인 항공기, 로봇 청소기, 환경 모니터링 등 지속적인 관측이 요구되는 응용 분야에 직접적인 활용 가치를 제공한다.
댓글 및 학술 토론
Loading comments...
의견 남기기