표면 위 임의 차수 그래프를 위한 지역 라우팅 알고리즘 GFR
초록
본 논문은 차수 (g)인 알려진 표면에 내장된 모든 연결 그래프에 대해, 전달을 보장하는 지역 라우팅 알고리즘 GFR을 제시한다. GFR은 (O(g\log n)) 메모리와 (O(g^{2}n^{2})) 실행 시간을 요구하며, 표면의 호몰로지 기저에 접근할 수 있으면 된다. 기존 평면 그래프용 Face Routing(FR)이 양의 차수 표면에서는 전달을 보장하지 못하는 문제를, 호몰로지 비자명 폐곡선이 오른손 규칙에 의해 방해되지 않도록 하는 새로운 수학적 보조정리(레마 \ref{lem:connectFaceBdr})를 이용해 해결한다. 이 결과는 3차원 센서 네트워크와 같은 고차원 ad‑hoc 네트워크에 대한 효율적인 로컬 라우팅 설계의 이론적 토대를 제공한다.
상세 분석
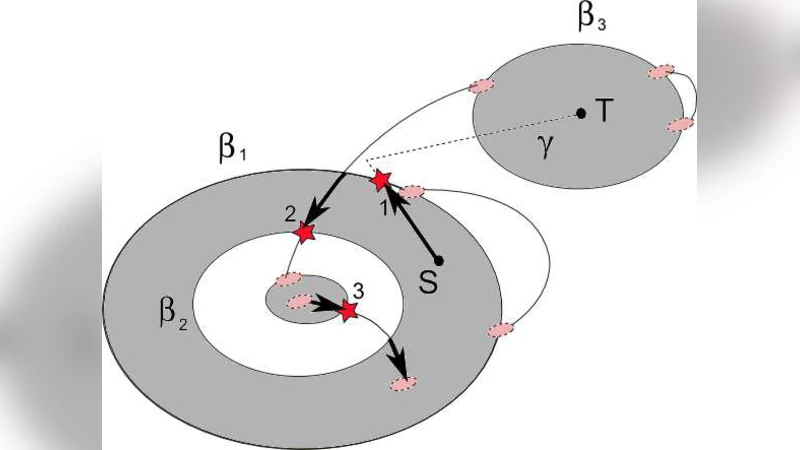
논문은 먼저 기존의 Face Routing(FR)이 평면 그래프에서 오른손 규칙을 이용해 면을 따라 이동함으로써 목적지까지 도달함을 재확인한다. 그러나 차수가 양수인 표면(예: 토러스)에서는 호몰로지적으로 비자명한 폐곡선이 존재할 수 있는데, 이러한 폐곡선은 오른손 규칙에 의해 무한히 순환할 위험이 있다. 저자들은 이를 해결하기 위해 표면의 호몰로지 기저를 사전에 알고 있다고 가정하고, 각 기저 원소에 대응하는 ‘절단 곡선’들을 정의한다. GFR은 라우팅 과정에서 현재 위치가 어느 절단 곡선과 교차하는지를 로컬하게 판단하고, 필요시 오른손 규칙을 잠시 멈추고 절단 곡선을 따라 이동함으로써 비자명한 순환을 탈피한다. 핵심은 레마 \ref{lem:connectFaceBdr}에서 증명된 “모든 면 경계는 호몰로지 기저와 적어도 하나의 교차점을 공유한다”는 성질이다. 이 성질을 이용하면 라우팅 중에 마주치는 모든 면은 반드시 기저와 연결되므로, GFR은 언제든지 현재 면을 벗어나 새로운 면으로 전진할 수 있다. 메모리 복잡도는 각 정점이 자신의 위치와 현재 절단 곡선 인덱스, 그리고 로그 규모의 기저 정보를 저장하면 되므로 (O(g\log n))에 머문다. 시간 복잡도는 최악의 경우 모든 면을 탐색하고, 각 탐색 단계에서 (g)개의 절단 곡선을 검사해야 하므로 (O(g^{2}n^{2}))가 된다. 이와 같은 복잡도는 차수가 고정된 경우(예: 센서 네트워크) 실용적인 수준이며, 특히 메모리 제약이 큰 무선 디바이스에 적합하다. 또한, GFR은 FR이 2차원 평면에서 성공한 이유가 ‘코디멘션 1’(그래프가 표면에 임베드된 차원) 때문임을 강조한다. 즉, 평면성 자체가 아니라 임베딩 차원의 낮음이 라우팅 효율을 좌우한다는 통찰을 제공한다.
댓글 및 학술 토론
Loading comments...
의견 남기기