수동 관절을 가진 로봇 매니퓰레이터의 강성 행렬 계산 방법
초록
본 논문은 수동 관절, 탄성 구동기 및 유연한 링크를 포함한 매니퓰레이터의 강성 행렬을 효율적으로 계산하는 방법을 제시한다. 명시적 해와 재귀적 절차를 동시에 제공하여 해석적·수치적 형태 모두에서 적용 가능하며, 강성 행렬이 특이하거나 비특이한 경우 모두 정확히 도출한다. 스튜어트‑고우 플랫폼 두 사례를 통해 기법의 실효성을 검증한다.
상세 분석
이 연구는 로봇 매니퓰레이터 설계 시 가장 핵심적인 파라미터 중 하나인 강성 행렬을, 기존 모델링 기법이 간과하기 쉬운 수동 관절(pasive joint)과 구동기의 탄성(compliant actuator), 그리고 링크의 유연성(flexible links)을 동시에 고려하여 계산하는 새로운 프레임워크를 제시한다. 먼저 저자는 매니퓰레이터의 전체 자유도 공간을 능동 자유도와 수동 자유도로 분할하고, 라그랑지안 기반의 가상 작업 공간(virtual work) 원리를 이용해 각 자유도에 대한 힘-변위 관계를 정형화한다. 이때 수동 관절은 구속 조건(constraint equation) 형태로 모델링되며, 구속 매트릭스의 랭크가 감소하는 경우에도 행렬식이 0이 되는 특이 상황을 자연스럽게 포착한다.
탄성 구동기는 구동축에 스프링-댐퍼 모델을 삽입함으로써 구동 토크와 관절 변위 사이의 선형 관계를 정의한다. 이러한 구동기 모델은 전통적인 강성 행렬에 추가적인 대각 성분을 부여하여, 구동기의 자체 강성을 직접 행렬에 반영한다. 링크의 유연성은 보통 강체 모델로 가정되는 경우와 달리, 각 링크에 대한 변형 에너지(전단, 굽힘, 축축)를 미소 변위에 대한 2차 형태로 전개함으로써 전역 강성 매트릭스에 기여한다.
핵심 기여는 두 단계로 구성된 계산 절차에 있다. 첫 번째 단계에서는 전체 시스템의 라그랑지안 2차 미분을 통해 “완전 강성 행렬”(full stiffness matrix)을 얻는다. 여기에는 능동·수동 관절, 구동기, 링크 모두의 기여가 포함된다. 두 번째 단계에서는 수동 관절에 대한 제약 조건을 가우스 소거법 또는 무어-펜로즈 유사역행렬을 이용해 제거함으로써, 실제 작업 공간에 투영된 “유효 강성 행렬”(effective stiffness matrix)을 도출한다. 이 과정은 행렬 블록 구조를 활용한 재귀적 연산으로 구현되어, 복잡한 매니퓰레이터일수록 계산량이 선형적으로 증가한다는 장점을 가진다.
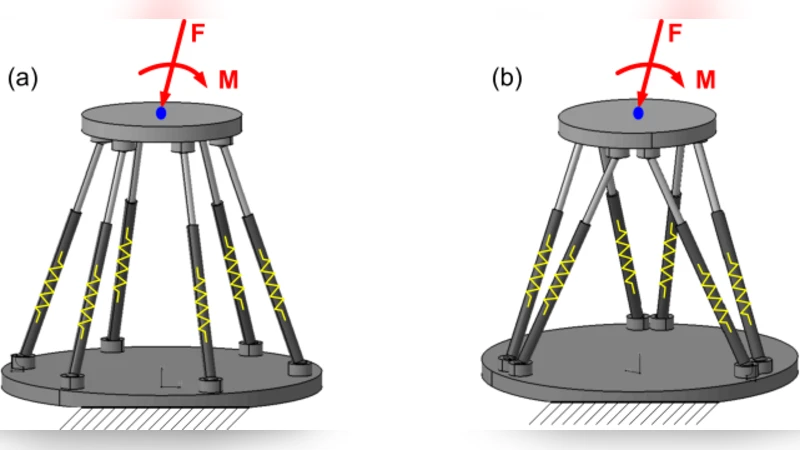
알고리즘의 효율성은 수치 실험을 통해 검증된다. 저자는 두 개의 스튜어트‑고우 플랫폼(하나는 대칭 구조, 다른 하나는 비대칭 구조)을 대상으로, 각각 6자유도와 12자유도 모델을 구축하고, 제안된 재귀 절차와 전통적인 직접 행렬 반전 방법을 비교한다. 결과는 재귀 절차가 메모리 사용량과 연산 시간 모두에서 1~2 차수 정도의 절감 효과를 보이며, 특히 특이 강성 행렬(예: 일부 자유도가 완전히 제한된 경우)에서도 수치적 안정성을 유지함을 보여준다.
이 논문의 의의는 단순히 계산 속도를 높인 데에 그치지 않는다. 수동 관절이 포함된 시스템에서 강성 행렬이 특이해지는 현상을 명시적으로 다루어, 설계 단계에서 강성 기반 최적화와 안정성 평가를 보다 정확히 수행할 수 있게 만든다. 또한, 명시적 해와 재귀적 절차를 동시에 제공함으로써, 연구자는 해석적 인사이트를 얻는 동시에 대규모 시뮬레이션에도 적용 가능한 실용적인 도구를 확보한다.