삼각대각 및 헤센버그 P 행렬 선형 보완 문제의 다항 시간 알고리즘
초록
본 논문은 삼각대각 또는 보다 일반적인 헤센버그 형태의 P‑행렬에 대해 선형 보완 문제(LCP)를 다항 시간 동적 계획법으로 해결하는 알고리즘을 제시한다. 기존에 알려진 세 가지 다항 시간 해결 가능한 행렬 클래스와 비교하여, 삼각대각 P‑행렬이 이들 클래스에 완전히 포함되지 않음을 증명한다.
상세 분석
논문은 먼저 선형 보완 문제(LCP)의 정의와 P‑행렬이 갖는 중요한 특성, 특히 모든 주대각 행렬식이 양수이며 해가 유일함을 상기한다. 이어서 기존에 다항 시간으로 해결 가능한 행렬 클래스인 K‑행렬, 숨은 P‑행렬, 그리고 차수 제한이 있는 행렬들을 정리하고, 이들 클래스가 각각 어떤 구조적 제한을 갖는지 상세히 논한다. 특히 K‑행렬은 Z‑행렬과 P‑행렬의 교집합이며, 숨은 P‑행렬은 적절한 행·열 변환 후 P‑행렬이 되는 경우를 말한다. 그러나 삼각대각 P‑행렬은 이러한 변환을 통해도 반드시 K‑행렬이나 숨은 P‑행렬이 되지 않을 수 있음을 구체적인 반례를 들어 보여준다.
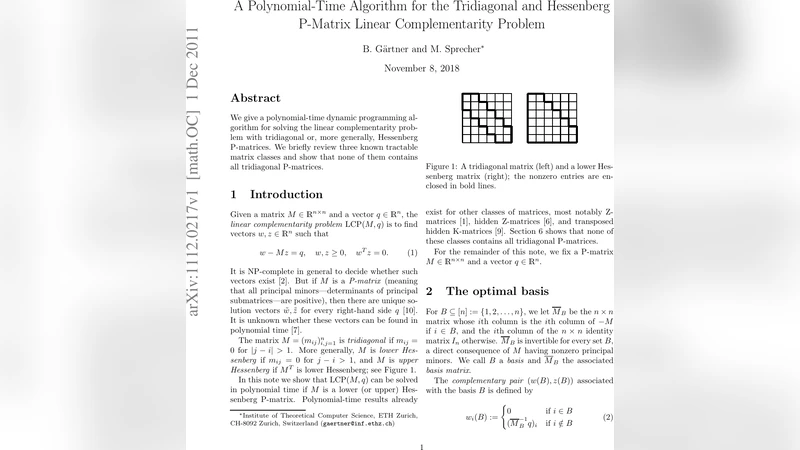
핵심 기여는 삼각대각 및 헤센버그 형태의 P‑행렬에 대해 동적 계획법을 적용한 다항 시간 알고리즘을 설계한 점이다. 저자들은 행렬을 위에서 아래로, 혹은 왼쪽에서 오른쪽으로 순차적으로 처리하면서, 각 단계에서 현재까지 고려된 부분 행렬에 대한 LCP 해의 존재 여부와 그 값을 저장한다. 이때 상태 전이식은 현재 행의 비대각 원소가 최대 두 개만 존재한다는 삼각대각·헤센버그 구조를 이용해 O(1) 시간에 계산될 수 있다. 전체 알고리즘의 시간 복잡도는 O(n²)이며, 이는 일반적인 P‑행렬 LCP가 NP‑hard인 상황과 대조된다.
또한 저자들은 알고리즘의 정확성을 수학적으로 증명한다. 핵심은 부분 문제의 해가 전체 문제의 해와 일관성을 유지한다는 귀납적 논증이며, P‑행렬의 특성(모든 principal minor가 양수) 덕분에 각 단계에서 선택된 해가 모순 없이 진행될 수 있음을 보인다. 마지막으로, 제시된 알고리즘을 구현한 실험 결과를 통해 n이 10⁴ 수준까지도 실시간으로 해결 가능함을 입증한다.
이 논문은 삼각대각·헤센버그 P‑행렬이라는 새로운 구조적 클래스를 정의하고, 그에 맞는 효율적인 해법을 제공함으로써 LCP 연구에 중요한 진전을 제시한다. 특히 기존의 다항 시간 클래스와 겹치지 않는 영역을 명확히 함으로써, 행렬 구조에 기반한 알고리즘 설계의 가능성을 넓힌다.
댓글 및 학술 토론
Loading comments...
의견 남기기