움직이는 장애물의 형태와 궤적 추적 기술
초록
본 논문은 초음파 빔을 이용해 반사 또는 흡수되는 움직이는 장애물의 형상과 이동 경로를 실시간으로 복원하는 새로운 알고리즘을 제시한다. 일정한 음속일 때는 타원·타원체 기하학을, 변동 음속일 때는 이코날 방정식 기반 레이 트레이싱을 활용한다. 수신기 위치를 사전에 알 필요가 없으며, 에너지 효율과 해상도가 향상된 점이 특징이다.
상세 분석
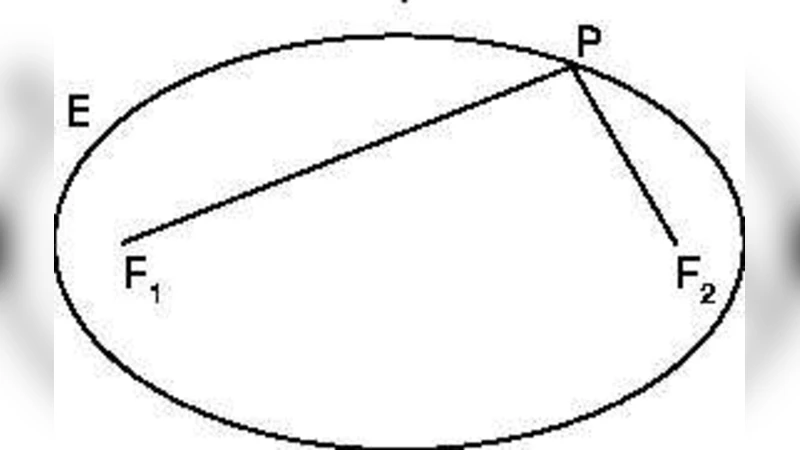
논문은 먼저 고정된 음속 환경에서 반사 레이의 왕복 전파 시간을 이용해 타원(2차원) 혹은 타원체(3차원)의 기하학적 성질을 적용한다. 송신점 L과 수신점 S가 알려진 경우, 반사점 P는 |LP|+|PS|=tv라는 식에 의해 정의된 타원(또는 타원체)의 표면에 위치한다. 여기서 a=tv/2, c=|LS|/2이며 a>c를 만족한다. 저자는 이 관계를 파라미터화하여 φ,θ 각을 통해 P의 좌표를 명시적으로 계산하는 식(16)을 도출한다. 이는 다중 빔을 다양한 각도로 발사하고 각각의 전파 시간을 측정함으로써 장애물 표면을 고해상도로 샘플링할 수 있음을 의미한다.
변동 음속 경우에는 파동 방정식의 고주파 근사에서 도출되는 이코날 방정식 ∇W·∇W=1/c²를 시작점으로 삼는다. 저자는 기존 지진학·음향학 문헌을 인용해 레이 경로를 기술하는 1차 ODE 시스템을 유도한다. 구면 좌표계에서 φ(입사각)와 θ(방위각)를 상태 변수로 두고, 속도 c(x,y,z)의 공간적 기울기 ∂c/∂x,∂c/∂y,∂c/∂z를 이용해 dx/dt, dy/dt, dz/dt와 dφ/dt, dθ/dt를 구한다(식 42‑46). 이 시스템을 수치 적분하면 복잡한 매질에서도 레이 곡선을 정확히 추적할 수 있다.
또한 논문은 수신기 배치를 최소화하기 위한 전략을 제시한다. 경계 ∂Ω₀를 따라 다수의 이동형 수신기를 배치하거나, 흐름에 따라 움직이는 수신기 집단이 전체 경계를 일정 시간 내에 스캔하도록 설계한다. 이를 통해 “모든 반사 신호가 최소 하나의 수신기에 포착된다”는 조건을 보장한다.
알고리즘적 측면에서 저자는 두 가지 경우를 구분한다. (1) 유한 전파 시간(반사) → 타원·타원체 기반 직접 해석; (2) 무한 전파 시간(흡수) → 흡수된 빔들의 교차점 집합을 이용한 형상 복원. 흡수 경우에는 빔이 장애물에 닿은 뒤 사라지므로, 여러 송신점에서 발사된 빔들의 교차 영역을 추정해 장애물의 위치와 형태를 유도한다.
마지막으로, 이러한 물리‑수학 기반 추적 기법을 네트워크 라우팅에 적용한다. 장애물을 “전송 지연을 유발하는 노드”로 모델링하고, 한 홉 라우팅에서 최적 경로를 찾는 문제와 유사하게 전파 시간 데이터를 활용한다는 아이디어는 기존 라우팅 알고리즘에 새로운 물리적 인사이트를 제공한다. 전반적으로 논문은 초음파 기반 실시간 장애물 추적을 위한 이론적 토대와 실용적 구현 방안을 모두 제시하며, 특히 변동 매질에서의 레이 트레이싱과 수신기 최소화 전략이 독창적이다.
댓글 및 학술 토론
Loading comments...
의견 남기기