전역 LTL 사양으로부터 분산 제어와 통신 전략 합성
초록
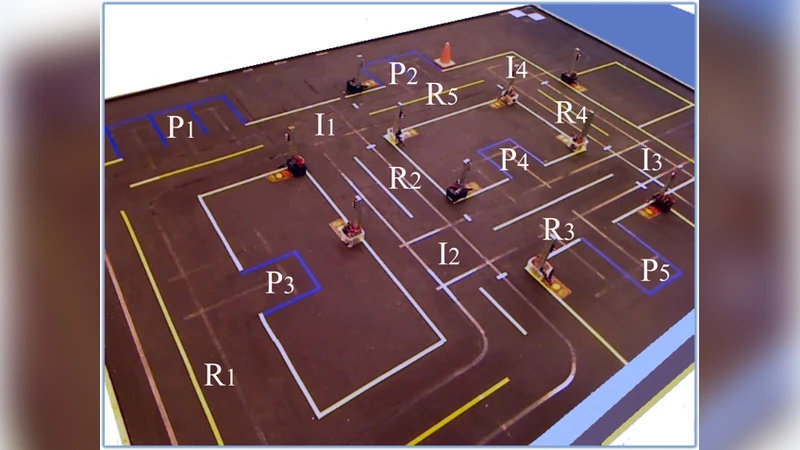
본 논문은 다중 로봇 팀이 만족해야 할 전역 LTL 사양을 각각의 에이전트가 실행 가능한 로컬 제어·통신 전략으로 자동 분해·합성하는 방법을 제시한다. 전역 사양이 trace‑closed이면 분산 가능성을 판단하고, 각 에이전트의 유한 전이 시스템 모델과 통신 요구를 고려한 구현 가능 자동자를 구성한 뒤, 교집합에서 임의의 실행을 선택해 로컬 전략을 생성한다. 실험은 미니어처 자동차가 도시형 환경에서 요청을 처리하도록 구현하였다.
상세 분석
이 논문은 전역 Linear Temporal Logic(LTL) 사양을 다중 에이전트 시스템에 적용하기 위한 두 단계의 합성 프레임워크를 제시한다. 첫 번째 단계는 동시성 이론(concurrency theory)에서 차용한 trace‑closed 개념을 이용해 전역 사양이 분산 가능한지 여부를 판정한다. LTL 공식 φ가 생성하는 언어 L(Bφ)가 주어진 프로퍼티 집합 Σ에 대한 분배 {Σ_i}에 대해 trace‑closed이면, 즉 모든 trace‑equivalence 클래스가 L(Bφ) 안에 포함되면, 각 에이전트가 독립적으로 수행할 수 있는 로컬 워드를 구성할 수 있다. 이는 전역 사양이 에이전트 간의 순서 의존성을 초래하지 않음을 의미한다.
두 번째 단계에서는 각 에이전트를 유한 전이 시스템(T_i)으로 모델링하고, 공유 프로퍼티에 대한 동기화 요구를 통신 프로토콜로 형식화한다. 여기서 제시된 cc‑strategy(제어·통신 전략)는 상태 방문 순서와 공유 프로퍼티가 동시에 만족될 때 발생하는 브로드캐스트·수신 과정을 포함한다. 각 T_i와 프로퍼티 집합 Σ_i를 이용해 구현 가능 자동자 B_i를 구성하고, 이를 전역 구현 자동자 B_imp = ⊗_i B_i(⊗는 언어 곱)와 결합한다. 최종적으로 L(Bφ)와 L(B_imp)의 교집합에서 하나의 실행 경로를 선택하면, 해당 경로를 각 에이전트의 로컬 워드 w_i로 투사(projection)할 수 있다. 이 w_i는 다시 T_i 상의 실제 경로로 매핑되어 로봇의 움직임 원시 명령으로 변환된다.
핵심 기여는 다음과 같다. (1) LTL 사양의 trace‑closed 판정을 통해 분산 가능성을 형식적으로 검증함으로써 기존 정규 언어 기반 방법보다 표현력을 크게 확대하였다. (2) 공유 프로퍼티에 대한 동기화 메커니즘을 명시적으로 모델링함으로써, 에이전트 간 통신 비용과 교착(deadlock) 가능성을 사전에 분석하고 방지한다. (3) 전체 프레임워크를 실제 로봇 플랫폼(RULE)에서 구현·실험함으로써, 추상화된 전이 시스템 모델이 물리적 로봇 제어와 어떻게 연결되는지를 보여준다.
이 접근법은 상태 공간 폭발(state‑space explosion) 문제를 완전히 해결하지는 못하지만, trace‑closed 사양에 한정함으로써 불필요한 전역 탐색을 회피하고, 각 에이전트의 로컬 모델 검사와 통신 스케줄링을 별도로 수행하게 함으로써 계산 복잡도를 실질적으로 낮춘다. 또한, 구현 자동자와 전역 사양 자동자의 교집합을 구하는 단계에서 기존 LTL 모델체크 도구(예: SPIN, NuSMV)를 재활용할 수 있어, 도구 체인 구축이 비교적 용이하다.
댓글 및 학술 토론
Loading comments...
의견 남기기