자동차 안전 크루즈 제어 시스템 설계 및 검증
초록
본 논문은 전방 레이더 센서를 기반으로 위험 상황을 실시간으로 판단하고, 위험 수준에 따라 운전자에게 경고를 제공하거나 크루즈 제어 모듈이 차량 속도를 자동으로 조절하도록 하는 안전 크루즈 제어 시스템을 설계하였다. ESTEREL을 이용한 동기식 구현과 시간 논리를 통한 형식 검증을 수행하여 시스템의 신뢰성을 입증하였다.
상세 분석
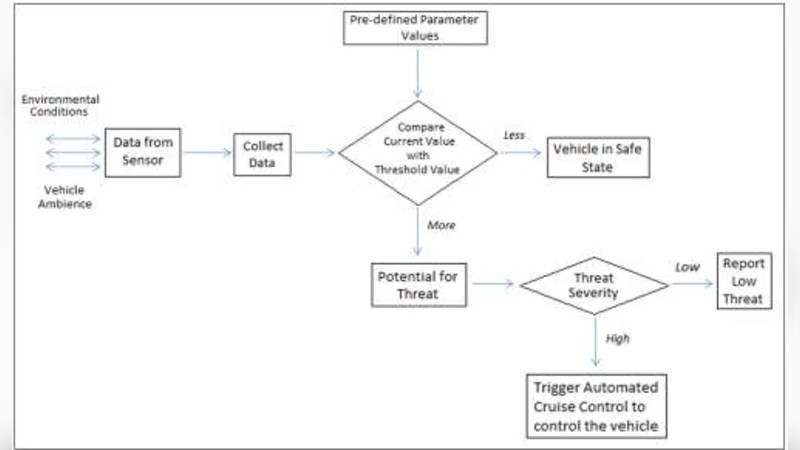
이 연구는 급증하는 차량 수와 그에 따른 충돌 위험을 감소시키기 위해 ‘Safety Cruise Control System’을 제안한다. 핵심은 전방 레이더(Foward Looking Automotive Radar)를 이용해 거리, 상대속도, 방위각(azimuth) 등 3가지 물리량을 실시간으로 수집하고, 이를 사전에 정의된 임계값과 비교하는 ‘Safety Algorithm’에 있다. 임계값 설정 방식으로는 제조사 기본값, 운전자 맞춤형 값, 환경 적응형 자동 학습값을 제시하여 다양한 운행 상황에 유연하게 대응하도록 설계하였다.
시스템 구조는 크게 ‘Safety System’과 ‘Cruise Control System’ 두 서브시스템으로 나뉘며, ESTEREL 기반의 동시성 모듈을 통해 각 서브시스템이 신호를 브로드캐스트 방식으로 교환한다. ESTEREL은 동기식 프로그래밍 언어로, 입력 신호에 대한 즉시 반응과 상태 전이를 명시적으로 기술할 수 있어 실시간 제어에 적합하다. 논문은 주요 모듈(SET_PREDEFINED_VALUES, ROAD_DATA, HOST_VEHICLE, DRIVER_ALARM 등)의 코드 스니펫을 제시하고, 각 모듈이 어떻게 병렬로 실행되는지를 보여준다.
형식 검증 부분에서는 시간 논리(Temporal Logic)를 이용해 ‘위험이 감지되면 1초 이내에 경고 신호가 발생한다’, ‘고위험 상황에서는 Cruise Control이 차량 속도를 감소시킨다’와 같은 안전 속성을 명시하고, ESTEREL 컴파일러가 생성한 유한 상태 기계(FSM)를 모델 체커에 입력해 증명하였다. 이는 설계 단계에서 논리적 오류를 사전에 차단하고, 실제 차량에 적용될 때 발생할 수 있는 비동기성 버그를 최소화한다는 점에서 큰 장점이다.
하지만 몇 가지 한계도 존재한다. 첫째, 레이더 센서만을 사용해 방위각을 무시하고 거리·속도만으로 위험을 판단한다는 점은 복잡한 교차로나 차선 변경 상황에서 오탐률을 높일 수 있다. 둘째, 임계값을 환경에 맞게 자동 학습한다는 주장은 제시되었으나, 구체적인 학습 알고리즘이나 데이터셋에 대한 설명이 부족하다. 셋째, ESTEREL 기반 구현은 이론적으로는 강력하지만, 실제 자동차 ECU에 이식하기 위한 하드웨어 자원(메모리, CPU 주기) 요구사항이 명시되지 않아 실용성 평가가 미흡하다.
전반적으로 이 논문은 동기식 프로그래밍과 형식 검증을 자동차 안전 제어에 적용한 사례로서 학술적 가치가 높으며, 특히 위험 수준에 따라 단계적 경고·제어 전환을 구현한 점이 실용적이다. 향후 연구에서는 다중 센서 융합, 머신러닝 기반 임계값 조정, 그리고 실제 차량 테스트를 통한 성능 평가가 추가된다면 시스템의 신뢰성과 적용 가능성을 크게 향상시킬 수 있을 것이다.
댓글 및 학술 토론
Loading comments...
의견 남기기