광시야 로봇망원경 TFRM, 우주 감시와 추적의 새로운 전초기지
초록
Fabra‑ROA Telescope at Montsec(TFRM)는 50 cm 구경의 기존 Baker‑Nunn 카메라를 전면 개조해 적도식 마운트와 4.4°×4.4° CCD 화각을 갖춘 완전 로봇망원경으로, V≈20 mag까지 30 s 노출로 관측이 가능하고, LEO·MEO·GEO 등 모든 궤도 객체를 실시간 트래킹할 수 있다. INDI 기반 원격 제어와 GPS ms 수준 시간 기준을 통해 우주 파편·NEO 감시와 정밀 궤도 결정에 활용될 수 있다.
상세 분석
본 논문은 1950년대에 제작된 Baker‑Nunn Camera(BNC)를 현대적인 광학·기계·제어 기술로 재탄생시킨 과정을 상세히 기술한다. 원본 BNC는 f/1 0.5 m 광학계와 30°×5°의 넓은 필드, 20 µm 이하의 스팟 크기를 자랑했으나, 1980년대 이후 레이더·레이저 등 새로운 추적 기술에 밀려 사용이 중단되었다. 스페인 해군 천문대(ROA) 소유의 한 대를 대상으로, 먼저 알트‑앵글 마운트를 적도식으로 전환하고, 디지털 서보드와 절대 엔코더를 적용해 HA·DEC 축을 고정밀(±10 µm)으로 제어한다. 광학적으로는 기존 3중 렌즈 보정계와 0.8 m 주경을 유지하면서, 64 mm CaF₂ 필드 플래터와 180 mm 실리카 에리시컬 멘시커스 렌즈를 추가해 6.25° 직경의 평탄한 필드를 확보한다.
카메라 부문에서는 Finger Lakes Instrumentation의 4k×4k, 9 µm 픽셀 CCD에 0.65 mm 거리로 필드 플래터를 결합하고, 90 mm 대구경 셔터와 냉각용 글리콜 순환 시스템을 장착했다. 결과적으로 3.9″/픽셀, 4.4°×4.4°의 무왜곡 화각을 얻었으며, V≈20 mag까지 30 s 노출로 탐지 가능하다.
제어 시스템은 INDI(Instrument-Neutral Distributed Interface) 프로토콜을 기반으로 Java 클라이언트와 XML 기반 스케줄러를 제공한다. 사용자는 원격 웹 인터페이스 혹은 스크립트(Python, Perl 등)로 관측 블록을 정의하고, TLE 혹은 직접 입력한 궤도 요소를 통해 실시간 트래킹을 수행한다. 셔터는 노출 중 임의 시점에 개폐가 가능해 인공위성 궤적에 시간 스탬프를 삽입할 수 있으며, GPS‑ disciplined LANTIME M200 시계가 ms 이하의 시간 정확도를 보장한다.
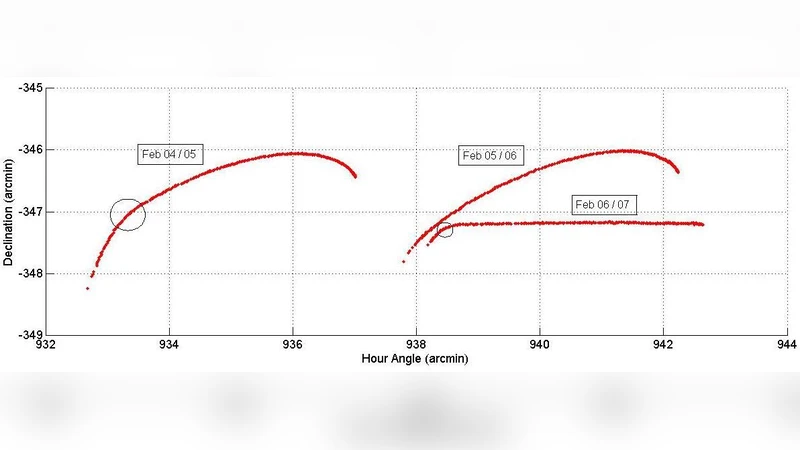
성능 검증으로는 2011년 ESA GEO 관측 캠페인에 참여해 175개의 MSG2 측정으로 2‑σ 불확실성이 반경 12 m, 이심률 1.8×10⁻⁶, 궤도경사 1.5×10⁻⁴° 수준임을 확인했다. 또한 GEO·LEO·MEO 대상의 연속 촬영과 자동 데이터 파이프라인 구축을 통해, 로봇모드에서의 장시간 연속 관측과 데이터 품질 관리가 실현 가능함을 입증하였다.
전반적으로 TFRM은 기존 BNC의 고품질 광학을 유지하면서, 현대적인 전자·소프트웨어 인프라를 결합해 저비용·고성능의 광시야 로봇망원경으로 재탄생했으며, 스페인·ESA의 SSA/SST 프로그램에 중요한 기여를 할 잠재력을 보인다.
댓글 및 학술 토론
Loading comments...
의견 남기기