고속 광학 추적을 위한 파브라‑ROA 망트세크 망원경의 현황
초록
파브라‑ROA 망트세크(TFRM)는 0.5 m f/1 버커‑넌 카메라를 4 년간 5 억 유로 이하의 예산으로 현대화한 로봇망원경이다. 4.4°×4.4° CCD 시야, 임의의 적경·적위 추적 속도, 노출 중 셔터 제어 등 특수 기능을 갖추어 GEO·MEO·LEO 인공위성의 정밀 위치 측정에 활용된다. 2011년 ESA CO‑VI 캠페인에서 1 137개의 측정값을 제공했으며, 현재 원격·무인 운영 단계에 있다.
상세 분석
본 논문은 1958년 스미소니언이 제작한 버커‑넌 카메라(BNC)를 스페인 해군 천문대(ROA)에서 인수·보존한 뒤, 최신 전자·제어 기술을 적용해 완전 로봇화한 사례를 상세히 제시한다. TFRM은 f/0.96이라는 극단적인 초점비와 0.5 m 주경을 유지하면서, 두 개의 보정 렌즈(멘시스·필드 플래트너)를 추가해 6.25° 직경의 평탄한 시야를 구현하였다. 4K×4K Finger Lakes PL16803 CCD는 9 µm(3.88″) 픽셀 크기로 4.4°×4.4° 전체 시야를 커버하며, 20 µm 스팟 사이즈가 시야 전역에서 80 % 이상의 에너지를 담는다. 포커스는 ±10 µm 정밀도를 보이며, 냉각은 냉각수 순환식 글리콜 챌린으로 안정적인 온도 유지가 가능하다.
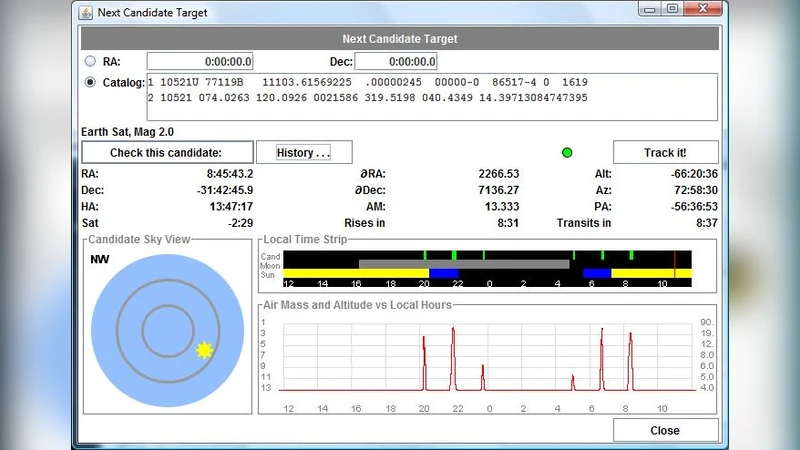
제어 시스템은 오픈소스 INDI 프레임워크를 기반으로 Java 클라이언트와 스케줄러를 맞춤 구현했으며, TLE(두 줄 궤도 요소)를 입력하면 실시간으로 위성 좌표를 계산해 적경·적위 추적 속도를 자동으로 업데이트한다. 이는 기존 광학 추적망에서 가장 큰 병목이던 “수동 궤도 입력·추적 설정”을 완전 자동화한 것으로, GEO와 같이 거의 정지하는 대상부터 LEO와 같이 초당 수도 회전하는 빠른 대상까지 동일한 인터페이스로 제어할 수 있다. 또한 노출 중 셔터를 0.1 ms 정확도로 개폐할 수 있어, 트레일 이미지에서 별과 위성의 상대적인 노출을 조절하거나, 다중 노출을 통한 시간 분해능 향상이 가능하다.
성능 시험 결과, 30 s 노출 시 V≈20 mag까지 도달했으며, 별 이미지에서 0.25″, 트레일 이미지에서 0.50″ 수준의 천문학적 정밀도를 확보했다. 이는 SExtractor 기반 측정보다 향상된 결과이며, APEX‑II 소프트웨어와 결합해 GEO 영역의 저조도 잔해물도 자동 검출할 수 있음을 보였다. 2011년 ESA CO‑VI 캠페인에서는 7일간 1 137개의 위성 위치를 기록했으며, ODTK를 이용한 궤도 결정에서는 반경 12 m, 이심률 1.8×10⁻⁶, 경사 1.5×10⁻⁴° 수준의 2σ 불확실성을 얻었다. 이는 기존 지상 레이더와 비교해도 경쟁력 있는 정밀도이며, 특히 낮 시간대에 발생하는 ‘인트랙’ 불확실성 증가를 정량적으로 파악했다.
현재 TFRM은 원격·무인 로봇 모드로 운영 중이며, 외부 협력망(ISON)과 연계해 GEO 잔해물 서베이 프로그램을 진행 중이다. 향후 하드웨어(예: 고감도 CMOS 카메라)와 소프트웨어(자동 트레일 추적·분류 알고리즘) 업그레이드를 통해 관측 효율과 자동화 수준을 한층 끌어올릴 계획이다.
댓글 및 학술 토론
Loading comments...
의견 남기기