동적 스태빙맥스 구조의 서브로그쿼리 시간 달성
본 논문은 1차원 구간에 대한 동적 스태빙맥스(최대 우선순위 구간 찾기) 문제를 선형 공간에서 최적의 O(log n/ log log n) 쿼리 시간으로 해결한다. 삽입은 O(log n) 시간, 삭제는 O(log n/ log log n) 시간(평균)으로 지원한다. 또한 차원을 d 로 확장하여 O(n·(log n/ log log n)^{d‑1}) 공간에 O((log n/ log log n)^{d}) 쿼리와 O((log n/ log log n)^{d…
저자: Yakov Nekrich
본 논문은 동적 스태빙맥스(stabbing‑max) 문제, 즉 한 점이 포함되는 구간 중 우선순위가 가장 높은 구간을 찾는 작업을 효율적으로 수행하는 자료구조를 제안한다. 문제 정의는 다음과 같다. 정적 집합 S 에 포함된 1차원 구간 s 각각에 정수 우선순위 p(s) 가 부여되어 있다. 쿼리 점 q 가 주어지면 q 를 포함하는 구간들 중 p(s) 가 최대인 구간을 반환한다. 동적 버전에서는 구간의 삽입·삭제도 지원한다.
**기존 연구와 한계**
- Yang·Widom(2002)와 Agarwal·et al.(2005) 등은 O(log n) 시간에 삽입·쿼리를 지원했지만, 삭제가 느리거나 공간이 Θ(n log n) 정도였다.
- Thorup(2006)은 쿼리를 O(1) 에 가깝게 만들었지만 업데이트가 Ω(n^{1/ℓ}) 정도로 비현실적이었다.
- Kaplan·et al.(2010)은 O(log n) 시간에 d‑차원 쿼리를 지원했지만, 여전히 O(log n) 쿼리 시간이 최선이었다.
**핵심 아이디어**
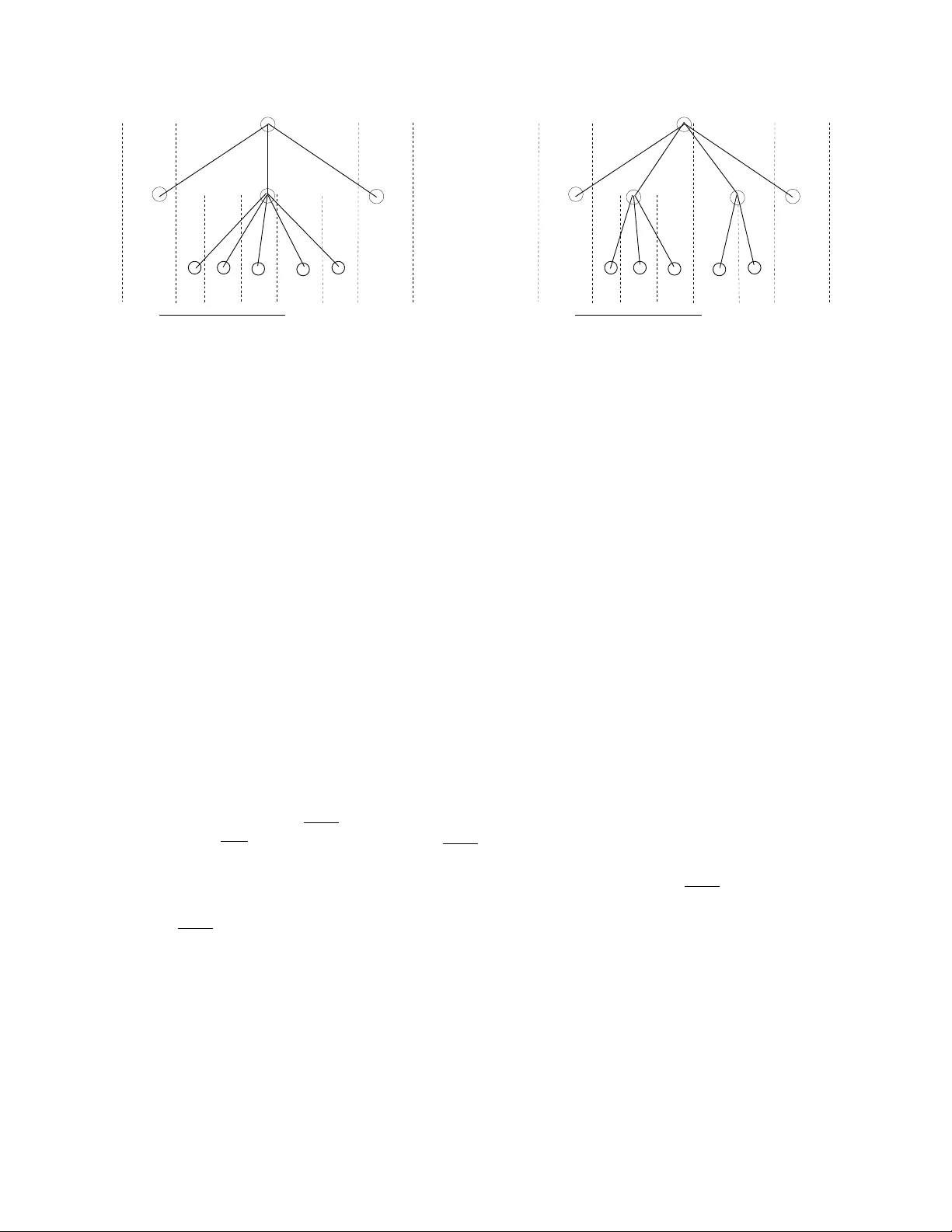
1. **베이스 트리 설계**: 구간 끝점을 리프에 저장하고, 각 내부 노드가 Θ(log^{ε} n) 개의 자식을 갖도록 하여 트리 높이를 h = O(log n/ log log n) 로 만든다. 이렇게 하면 쿼리 경로 길이가 하한과 일치한다.
2. **보조 구조 D(u)와 M(u)**: 각 내부 노드 u 에 대해 구간 집합 S(u) 를 S_{lr}(u) (특정 연속 자식 구간에 걸친 구간) 로 분할하고, 각 S_{lr}(u) 에 대해 Van Emde Boas(VEB) 구조를 적용해 O(log log n) 시간에 predecessor와 최대값을 찾는다. M(u) 는 각 S_{lr}(u) 의 최대 구간을 상수 시간에 반환하도록 한다.
3. **압축 리스트 Comp(u)**: VEB 구조를 그대로 두면 O(p_max) 공간이 필요해 Ω(n²) 공간이 된다. 이를 해결하기 위해 구간을 식별자 형태(자식 인덱스 리스트)로만 저장한다. 식별자는 최대 5 개의 자식 인덱스로 구성돼 O(log log n) 비트만 차지한다. 구간들을 우선순위 순으로 블록화하고, 각 블록에 라벨을 부여해 라벨 순서가 우선순위 순서와 일치하도록 한다. 블록 내부에서는 rank/select를 상수 시간에 수행할 수 있는 F(B) 구조를 유지한다.
4. **부모‑자식 위치 변환**: 한 구간이 Comp(u) 에서 차지하는 위치(블록·오프셋)가 알려지면, 동일 구간이 부모 Comp(w) 에서 차지하는 위치를 O(1) 시간에 계산할 수 있다. 이는 쿼리·업데이트 시 경로를 따라 이동하면서 필요한 정보를 즉시 얻을 수 있게 한다.
5. **Lazy Deletion과 전역 재구축**: 삭제 시 식별자를 즉시 제거하지 않고 “삭제 표시”만 남긴다. 전체 식별자 중 절반 이상이 삭제된 경우에만 전체 트리와 보조 구조를 재구축한다. 재구축 비용은 O(n log n/ log log n) 이며, 삽입·삭제 연산에 균등하게 분산돼 평균 O(log n/ log log n) 시간을 유지한다.
**연산 복잡도**
- **쿼리**: 루트→리프 경로를 따라 h 번 방문, 각 노드에서 M(u) 와 D(u) 를 이용해 상수·log log n 시간 연산을 수행하므로 전체 O(log n/ log log n).
- **삽입**: 해당 구간이 포함되는 O(log n/ log log n) 개의 S(u) 에 식별자를 삽입하고, 필요 시 M(u) 를 업데이트한다. 각 삽입은 O(log n) 시간(블록 라벨 재조정 포함)이다.
- **삭제**: 동일 경로에 대해 식별자를 “삭제 표시”하고, M(u) 를 갱신한다. 평균 O(log n/ log log n) 시간.
- **공간**: 모든 Comp(u) 에 저장된 식별자는 전체 O(n log n/ log log n) 개이며, 각 식별자는 O(log log n) 비트이므로 전체 O(n) 워드(≈ O(n log n) 비트)이다.
**다차원 확장**
d‑차원 구간(직사각형) 문제는 각 차원에 대해 위와 동일한 베이스 트리를 겹쳐 만든 d‑차원 카테시안 트리를 사용한다. 각 노드에서 d‑1 차원의 보조 구조를 유지해, 전체 복잡도는 차원 수에 대해 지수적으로 증가한다. 구체적으로:
- **공간**: O(n·(log n/ log log n)^{d‑1})
- **쿼리**: O((log n/ log log n)^{d})
- **삽입**: O((log n/ log log n)^{d} log log n)
- **삭제**: O((log n/ log log n)^{d})
**스태빙‑섬 확장**
구간 개수를 세는 스태빙‑섬(stabbing‑sum) 쿼리도 동일 구조에 카운터를 추가해 O(log n/ log log n) 시간에 처리한다. 삽입·삭제 시간도 기존과 동일하게 유지된다.
**결론 및 의의**
- 워드 RAM 모델에서 최적 하한 Ω(log n/ log log n) 에 도달하는 최초의 동적 스태빙맥스 구조이다.
- 선형(비트) 공간을 유지하면서 삽입·삭제를 다항식 시간에 처리한다.
- 블록 라벨링·식별자 압축 기법은 다른 정렬·범위 보고 문제에도 적용 가능성이 높다.
- 다차원 및 스태빙‑섬 확장은 실무(네트워크 라우팅, GIS 등)에서 바로 활용될 수 있다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기