각도 제한 스테인러리 아보레센스를 이용한 흐름지도 레이아웃
본 논문은 흐름지도의 시각적 품질을 높이기 위해, 소스와 다수의 타깃을 연결하는 최소 길이 트리를 각도 제한 조건 하에 설계한다. 최적 플럭스 트리는 평면이며 로그 나선과 직선 구간으로 이루어지고, 계산이 NP‑hard임을 보인다. 이를 완화한 ‘스파이럴 트리’는 로그 나선만 사용해 근사해를 제공하며, 2‑근사 알고리즘을 제시하고 장애물 회피까지 확장한다.
저자: Kevin Buchin, Bettina Speckmann, Kevin Verbeek
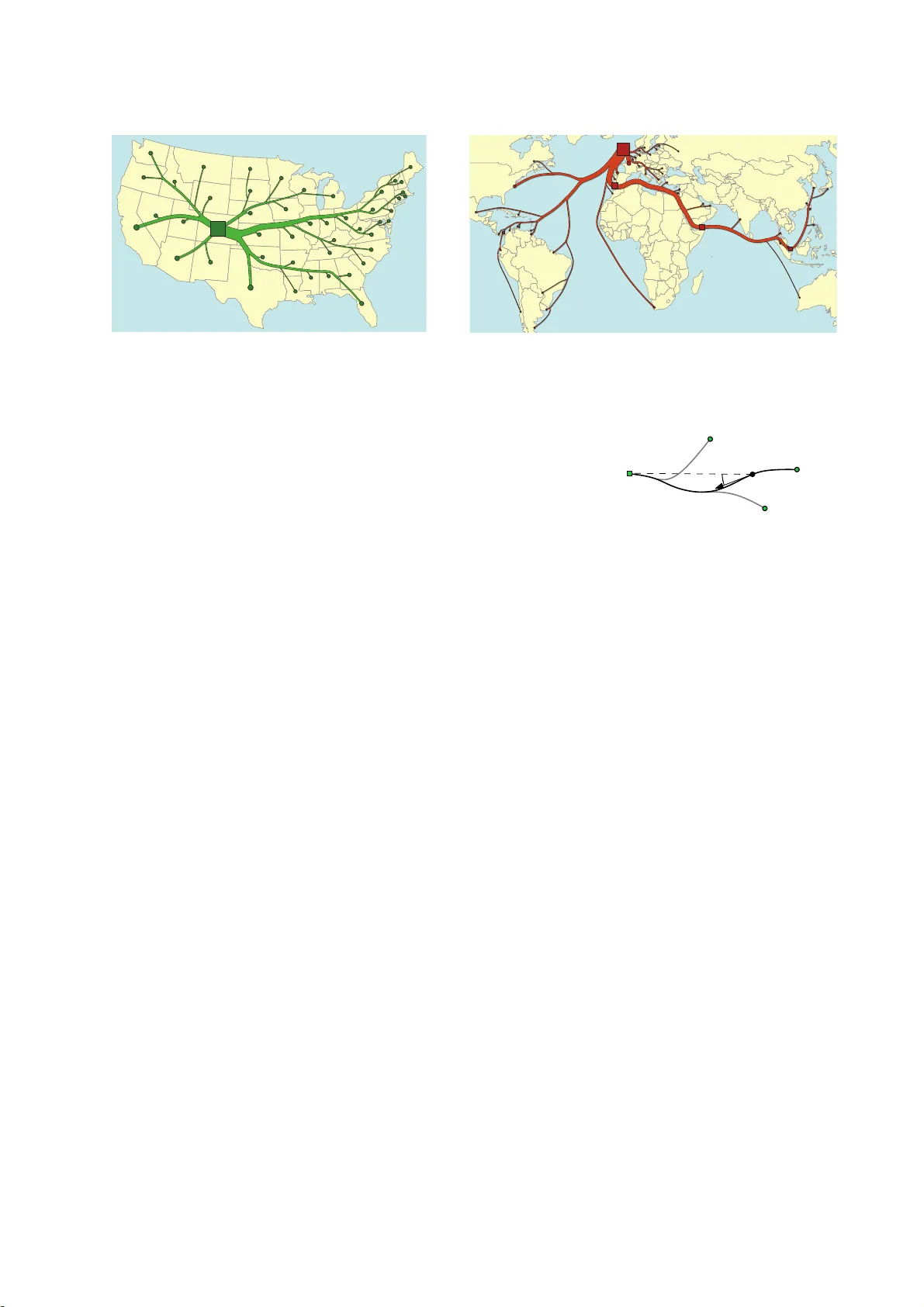
본 논문은 흐름지도(flow map)의 시각적 품질을 향상시키기 위해, 소스(루트)와 다수의 타깃을 연결하는 최소 길이 트리를 새로운 각도 제한 조건 하에 설계한다. 흐름지도는 객체의 이동을 시각화하면서도 선들의 부드러운 병합과 교차 방지를 요구한다. 기존의 유클리드 스테인러리 트리(ESA)나 직교 스테인러리 트리(RSA)는 이러한 요구를 만족시키지 못한다. 따라서 저자들은 ‘각도 제한 스테인러리 아보레센스(angle‑restricted Steiner arborescence)’, 즉 플럭스 트리(flux tree)를 정의한다. 플럭스 트리는 모든 아크가 루트와 이루는 각이 α(<π/2) 이하가 되도록 제한한다. 이 제한은 각 아크가 루트 방향으로 일정한 기울기를 유지하도록 강제해, 자연스럽게 곡선이 로그 나선 형태를 띠게 만든다.
논문은 먼저 최적 플럭스 트리의 구조적 특성을 정리한다. (1) 최적 트리의 모든 아크는 직선 구간 혹은 로그 나선 구간으로만 이루어지며, 두 종류의 곡선이 교차하지 않는다. (2) 루트를 제외한 모든 내부 정점은 최대 두 개의 들어오는 아크만 가질 수 있다. (3) 최적 트리는 평면이며, 교차가 없다는 것이 증명된다. (4) 플럭스 트리는 ‘얕은‑빛’ 특성을 가지며, 최적 트리의 전체 길이는 동일한 정점 집합에 대한 최소 신장 트리(MST) 대비 O((sec α + csc α)·log n) 배 이내이고, 각 정점에서 루트까지의 경로 길이는 sec α 배 이하로 제한된다.
하지만 최적 플럭스 트리를 구하는 문제가 NP‑hard임을 섹션 4.1에서 증명한다. 따라서 실용적인 근사 해법이 필요하다. 이를 위해 저자들은 ‘스파이럴 트리(spiral tree)’를 도입한다. 스파이럴 트리는 로그 나선만을 사용해 아크를 구성하므로, 각도 제한을 자동으로 만족한다. 논문은 스파이럴 트리가 최적 플럭스 트리를 sec α 배 이내로 근사한다는 정리 1을 증명한다. 특히 α=π/6(30°)일 경우 sec α≈1.15이므로, 실제 적용 시 거의 최적에 가까운 결과를 얻는다.
알고리즘적 기여는 다음과 같다. (i) 특수 경우(예: 터미널이 원점으로부터 동일한 거리에 있을 때)에는 O(n³) 시간에 정확한 최적 스파이럴 트리를 구하는 동적 계획법을 제시한다. (ii) 일반 경우에는 O(n log n) 시간에 2‑근사 해를 제공하는 그리디 기반 알고리즘을 설계한다. 이 알고리즘은 터미널을 거리 순으로 정렬하고, 각 터미널에 대해 현재 트리 내에서 가장 가까운 ‘스파이럴 영역’에 속하는 정점을 찾아 연결한다. (iii) ‘양의 단조(positive monotone)’ 장애물(거리와 각도가 동시에 증가하거나 감소하는 형태) 존재 시에도 동일한 2‑근사 비율을 유지하도록 알고리즘을 확장한다. 장애물 회피는 스파이럴 영역을 장애물 경계에 맞게 절단하고, 절단된 영역을 다시 로그 나선으로 연결하는 방식으로 구현한다.
실험에서는 α=π/6을 사용했으며, 플럭스 트리와 스파이럴 트리 간의 길이 차이가 5% 이하로 나타났다. 또한, 제안된 2‑근사 알고리즘은 수천 개의 터미널을 가진 대규모 데이터셋에서도 실시간에 가까운 속도로 동작했으며, 생성된 흐름지도는 시각적으로 부드럽고 교차가 없었다. 논문은 또한 동반 연구(
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기