추가 지역 상호작용을 통한 교통 정체 해소
초록
본 연구는 제한된 가속·감속과 운전자 과잉반응을 포함한 셀룰러 오토마타 모델을 이용해 단일 차선 교통 흐름을 시뮬레이션한다. 차량 밀도 ρ에 따라 자유 흐름(F), 동기화 흐름(S), 정체(J) 세 단계가 나타나며, ρ를 감소시켜도 정체 상태에서 벗어나기 어려운 히스테리시스가 관찰된다. 저자들은 하류 차량의 속도 정보를 활용해 정체 전방 차량을 방어적으로 전환시키는 간단한 로컬 규칙을 제안하고, 이를 통해 정체가 빠르게 소멸하고 흐름이 회복됨을 보였다.
상세 분석
이 논문은 기존의 Kerner‑Klenov‑Wolf(KKW) 모델과 Nagel‑Schreckenberg 모델을 확장한 형태의 셀룰러 오토마타(CA) 프레임워크를 채택한다. 시간·공간 격자는 각각 Δt = 1 s, Δx = 1.5 m 로 설정하고, 차량의 최대 속도는 v_max = 20셀(≈108 km/h) 로 제한한다. 운전자의 행동은 두 가지 상태 γ∈{0,1} 로 표현되며, γ = 0은 ‘낙관적(optimistic)’·감속 여유가 작은 운전, γ = 1은 ‘보수적(defensive)’·안전거리 확보를 중시하는 운전을 의미한다. γ는 차량 앞쪽 2대의 속도 관계와 v_max‑1 이하 여부에 따라 동적으로 전환된다. 이러한 설계는 인간의 과잉반응(over‑reaction)을 모델링하면서도, 제한된 감속·가속 능력이라는 물리적 제약을 동시에 반영한다.
시뮬레이션은 길이 L = 40 000셀(≈60 km)의 원형 도로에 N = 600대(ρ = 10 veh/km) 를 균일 배치하고, 초기 과도 현상을 배제하기 위해 T = 30 000 스텝을 버린 뒤 평균 속도 v_avg와 흐름 Φ = ρ·v_avg 를 측정한다. ρ를 서서히 증가시키면 Φ는 상향 지점에서 급격히 전이하며, 자유 흐름(F) → 동기화 흐름(S) → 정체 흐름(J) 순으로 단계가 나타난다. 반대로 ρ를 감소시킬 경우, 정체 상태에서 시작하면 Φ는 하향 지점의 하위 분기(lower branch)를 따라 움직이며, 히스테리시스 루프가 형성된다. 이는 정체가 한 번 형성되면 외부에서 밀도를 크게 낮추지 않는 한 자연스럽게 해소되지 않음을 의미한다.
정체 해소를 위한 핵심 아이디어는 ‘하류 차량의 속도 정보를 이용해 상류 정체 전방 차량을 방어적으로 전환한다’는 것이다. 구체적으로 m번째 앞선 차량의 속도가 임계값 v_th 이하이면 해당 차량의 γ를 1로 설정한다. 파라미터 탐색 결과, v_th = 8셀(≈43 km/h) 그리고 10 ≤ m ≤ 30 범위에서 정체가 가장 빠르게 소멸한다. 거리 기반 변형으로는, 하류에 거리 d 이내에 있는 가장 느린 차량의 속도가 v_th 이하이면 γ = 1 로 전환하는 방식을 제안했으며, d ≈ 50셀(≈75 m) 이하에서도 효과가 확인되었다. 정체 해소율은 전체 차량 중 80 % 이상이 이 규칙을 적용받을 때 거의 확실히 정체가 사라진다.
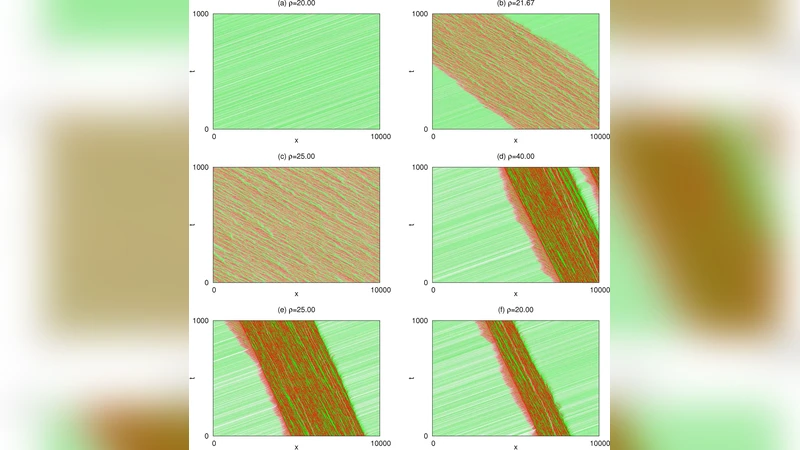
시공간(x‑t) 플롯을 통해 정체 전방의 방어적 운전자가 점차 늘어나면서 정체 구역의 밀도가 감소하고, 결국 상류와 하류 정체 전선이 만나 소멸되는 과정을 확인했다. 정체 해소 후 평균 속도는 약 50 km/h 로 회복되며, 흐름 Φ는 원래 하위 분기보다 현저히 높아진다. 전체 ρ 구간(20 ≤ ρ ≤ 30 veh/km)에서 히스테리시스가 사라지고, 동일 밀도에서도 상향 분기와 동일한 흐름을 유지한다는 점이 가장 큰 성과이다. 다만 ρ > 31 veh/km에서는 정체 해소 규칙이 오히려 흐름을 악화시킬 수 있음을 보고한다.
댓글 및 학술 토론
Loading comments...
의견 남기기