인공 개미 집단의 역할 분담 전략
초록
본 논문은 인공 개미 군집이 식량 탐색 과제에서 수행하는 역할 분담(폴리테즘) 메커니즘을 모델링하고, 캐스트형·연령형 두 종류의 적응적 폴리테즘이 정적·동적 환경에서 탐색·활용 균형을 어떻게 최적화하는지를 시뮬레이션을 통해 평가한다.
상세 분석
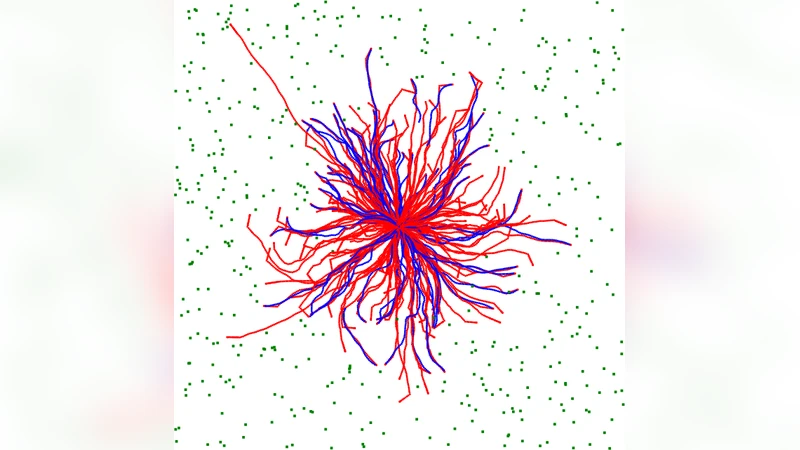
이 연구는 자연계 사회성 곤충에서 관찰되는 두 가지 폴리테즘, 즉 캐스트(polyethism)와 연령(temporal) 폴리테즘을 인공 에이전트에 적용한다. 실험에 사용된 인공 개미는 ‘탐색자(explorer)’와 ‘활용자(exploiter)’라는 두 행동 전략을 갖는다. 탐색자는 ‘시커(seeker)’ 트레일을 남기며 직선으로 외부를 탐색하고, 식량을 발견하면 ‘캐리어(carrier)’ 트레일을 새로 만든다. 반면 활용자는 기존의 캐리어 트레일을 따라 이미 발견된 식량원을 집중적으로 수확한다. 이러한 두 전략은 자연 개미가 군집 규모에 따라 개별 탐색과 협동적 수확을 전환하는 현상을 모방한다.
시뮬레이션 환경은 균일 분포, 패치형, 이동 패치, 계절 변화, 혼합의 다섯 가지로 정의되며, 식량은 매 5 라운드마다 일정량이 떨어지고 1000 라운드 후 사라진다. 개미 군집은 여왕, 일꾼, 유충, 식량 저장소로 구성되고, 일꾼은 450 라운드마다 에너지를 소모한다. 여왕은 식량 저장량이 현재 인구(일꾼+유충)보다 클 때만 새로운 유충을 생성한다.
네 종류의 군집 모델이 비교된다. ① 탐색자 전용 군집(정적 탐색 전략), ② 활용자 전용 군집(정적 협동 전략), ③ 적응형 캐스트 폴리테즘(여왕이 최근 500 라운드의 성공률에 비례해 탐색자·활용자 비율을 조정), ④ 연령 기반 폴리테즘(신규 일꾼은 탐색자로 시작하고, 일정 나이(또는 1~2번의 탐색 라운드) 후 성공률에 따라 역할을 전환). 캐스트와 연령 모델 모두 최소 하나의 각 역할을 유지해 성공률 추정을 가능하게 한다.
실험 결과는 다음과 같다. 균일 환경에서는 탐색자 전용이 거의 최적에 가깝지만, 군집 규모가 커지면 활용자 전용도 비슷한 성능을 보인다. 패치형 환경에서는 활용자 전용이 명확히 우수했으며, 탐색자는 무작위 방향으로 나가다 대부분 빈손으로 돌아온다. 이동 패치와 계절 변화와 같은 동적 환경에서는 적응형 캐스트와 연령 폴리테즘이 가장 높은 식량 수확량과 안정적인 인구 유지율을 기록했다. 특히, 두 적응 모델은 탐색과 활용 사이의 전환을 자동으로 수행해 환경 변화에 빠르게 대응한다. 혼합 환경에서도 동일한 경향이 나타났으며, 정적 모델은 어느 한쪽 전략에 치우쳐 성능이 저하되는 반면, 적응형 모델은 두 전략을 동시에 활용해 전반적인 효율을 극대화한다.
이러한 결과는 머신러닝의 탐색‑활용 트레이드오프와 직접적인 연관성을 가진다. 캐스트 폴리테즘은 메타-전략 수준에서 탐색·활용 비율을 동적으로 조정하는 ‘스위치’ 역할을 하며, 연령 폴리테즘은 개별 에이전트가 경험에 기반해 역할을 전환하는 응답 임계값 모델을 구현한다. 따라서 복잡하고 변동적인 작업 공간에서 다중 로봇·다중 에이전트 시스템이 자율적으로 역할을 재배분하는 메커니즘으로 활용 가능하다. 또한, 에너지 소비와 수명 제한을 고려한 설계는 실제 로봇 플랫폼에서 배터리 관리와 연계될 수 있다.
결론적으로, 본 논문은 다양한 환경에 대한 적응성을 확보하기 위해 폴리테즘을 도입하는 것이 정적 역할 할당보다 우수함을 실증하였다. 이는 자연계에서 관찰되는 복잡한 사회적 구조가 인공 시스템에서도 효율적인 분산 협업을 가능하게 함을 시사한다.
댓글 및 학술 토론
Loading comments...
의견 남기기