패시브 다리 역학을 활용한 보행 전이와 부분 안정성 연구
초록
본 논문은 스프링‑로드 인버티드 펜듈럼(SLIP) 모델을 하이브리드 동역학 프레임으로 재해석하고, ‘부분 안정성’과 ‘생존 가능성’이라는 개념을 도입한다. 이를 통해 동일 에너지 수준에서 걷기·달리기·점프(그라운드‑리프팅) 사이의 전이를 불안정 영역을 의도적으로 이용해 구현함을 보인다. 또한 각 착지 각도(Angle‑of‑Attack)를 비정상적으로 조절하는 간단한 정책만으로도 거의 모든 초기 상태를 안정 영역으로 끌어들일 수 있음을 시뮬레이션으로 입증한다.
상세 분석
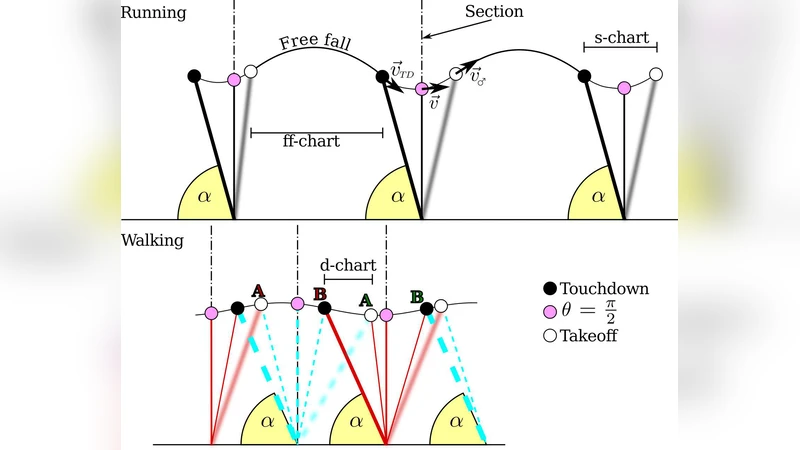
SLIP 모델은 기존에 걷기와 달리기를 각각 별개의 제한된 매핑으로 설명했으며, 동일 에너지에서 두 매핑의 수렴 영역이 겹치지 않아 전이가 불가능하다고 여겨졌다. 저자들은 이를 하이브리드 시스템의 관점에서 ‘차트(chart)’—비행, 단일 스탠스, 이중 스탠스—로 분할하고, 각 차트 사이의 전이 조건을 이벤트 함수로 정의한다. 중요한 점은 각 차트가 보존적인 힘(중력·스프링)만을 포함하므로 에너지는 전 구간에서 일정하다는 것이다.
‘부분 안정성(Finite Stability)’은 특정 착지 각도(CAAP) 하에서 연속적인 매핑을 몇 번 수행할 수 있는 초기 조건 집합을 의미한다. 이 집합이 넓을수록 제어기가 매 단계마다 각도를 재조정할 필요가 줄어든다. ‘생존 가능성(Viability)’은 주어진 초기 상태에서 실패를 피하기 위해 선택 가능한 착지 각도의 범위(Δα)를 측정한다. 두 개념을 동시에 고려하면, 불안정 영역에 머물면서도 적절한 각도 선택을 통해 곧바로 안정 영역(E_i^∞)으로 이동할 수 있는 ‘전이 지점’이 도출된다.
시뮬레이션에서는 전체 에너지를 820 J로 고정하고, 각도 55°90° 범위에서 400가지 샘플을 사용해 Delaunay 삼각 메쉬(≈66 k 초기점)를 구성하였다. 매 매핑은 MATLAB/Octave의 ode45로 적분하고, 삼각형 내부에서 선형 보간을 적용해 연속적인 상태 전이를 계산한다. 결과는 다음과 같다. (1) 달리기(R)와 보조 달리기(GR), 걷기(W) 모두 1025 단계 정도의 부분 안정성을 보였으며, 특히 GR과 W는 넓은 ‘플레이트’ 형태의 안정 영역을 형성한다. (2) 거의 모든 초기 조건에 대해 두 단계의 가변 각도 정책만으로도 안정 영역(E_i^∞)에 진입할 수 있음을 확인했다. (3) 전이 영역은 ‘Δα ≥ 2°’ 조건을 만족하는 곳에서 발견되었으며, 이는 실제 로봇이 센서·액추에이터의 해상도와 잡음을 고려해도 실현 가능함을 의미한다.
이러한 발견은 기존 SLIP 기반 보행 제어가 ‘고정 각도’ 정책에 의존해 전이 불가능하다고 판단했던 한계를 넘어선다. 비정상적인 각도 조절을 허용하면, 패시브 다리 역학을 그대로 이용하면서도 다양한 보행 모드 간에 부드러운 전이가 가능해진다. 이는 에너지 효율이 높은 바이페달 로봇 설계와, 인간 보행 보조기구에서의 실시간 모드 전환에 직접적인 응용 가능성을 제공한다.
댓글 및 학술 토론
Loading comments...
의견 남기기