제어 시스템 의미 표현을 위한 통합 그래픽 환경
초록
본 논문은 Simulink와 유사한 그래픽 모델링 툴에 제어 시스템의 안정성·성능 증명 정보를 직접 삽입하고, 이를 자동으로 Lustre·C와 같은 검증 언어로 변환하는 확장 프레임워크를 제안한다. 새로운 블록·와이어 타입을 정의하고, 제3자 분석 도구(IQCβ, µ‑tool)와 연동해 증명 매개변수를 자동 생성하도록 설계하였다.
상세 분석
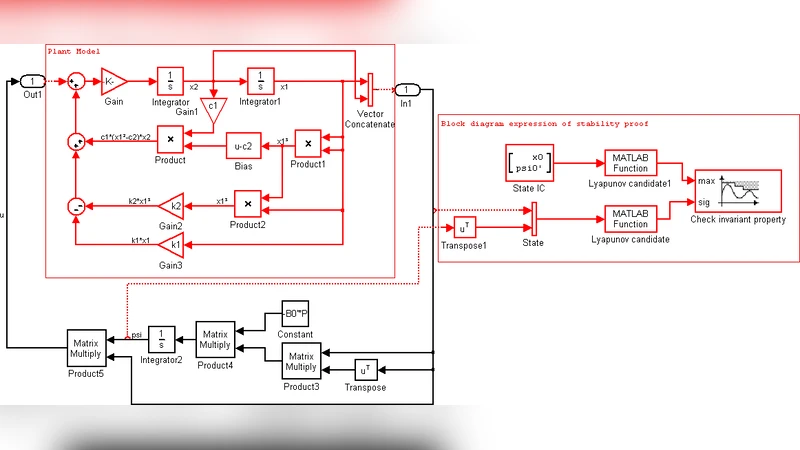
이 논문은 제어 엔지니어와 검증·인증 엔지니어 사이의 지식 격차를 그래픽 모델링 단계에서 메타데이터 형태로 메꾸려는 시도를 보인다. 기존 Simulink의 어노테이션 기능은 주로 시뮬레이션 파라미터에 국한되지만, 저자는 안정성(리야푸노프 함수, 양의 정부호 행렬 P)과 L₂·L₁ 이득, 적응 제어 성능 한계 등 수학적 증명을 블록 형태로 시각화한다는 점에서 차별성을 가진다. 특히 ‘stability’ 블록에 P, 노이즈 특성, 상태 변수 등을 파라미터로 지정하도록 함으로써, 증명 자동화 파이프라인과의 인터페이스를 단순화한다.
기술적 핵심은 세 가지로 요약할 수 있다. 첫째, 새로운 블록·와이어 타입을 정의해 제어 시스템의 상태와 비상태 신호를 구분하고, 증명 전용 신호는 코드 생성 시 제외한다는 형식적 구분을 도입했다. 둘째, 전처리 단계인 Verification Block Generator가 기존 모델에 증명용 블록을 삽입하고, 필요 시 제3자 툴이 제공하는 P 행렬을 자동으로 채워 넣는다. 셋째, 백엔드 번역기가 그래픽 모델을 Lustre·C와 같은 형식화된 언어로 변환하면서 시간 이산화와 같은 구현 세부 사항을 고려한다.
하지만 몇 가지 한계도 존재한다. 현재 제안된 ‘stability’ 블록은 주로 2차형 리야푸노프 함수에 기반하므로, 비선형·비다항형 증명(예: 바이어스된 Lyapunov 함수)에는 적용이 어려울 수 있다. 또한, 자동 생성된 P 행렬이 실제 설계 사양과 일치하는지 검증하는 절차가 논문에 상세히 제시되지 않아, 사용자가 결과를 신뢰하기 위해 추가 검증이 필요할 것으로 보인다. 워크플로우가 복잡한 적응 제어나 고차원 시스템에 적용될 때, 블록 수와 와이어 복잡도가 급증할 위험도 언급되었다.
전반적으로 이 논문은 그래픽 모델링 단계에서 제어 이론 증명을 메타데이터로 캡처하고, 검증 도구와의 자동 연동을 시도한 최초의 시도 중 하나이며, 향후 형식적 의미론 정의와 툴 체인 통합을 통해 실용성을 높일 여지가 크다.
댓글 및 학술 토론
Loading comments...
의견 남기기