구간별 선형 차량추종 모델
본 논문은 기존의 선형 차량추종 모델과 min‑plus 모델을 일반화한 구간별 선형(car‑following) 모델을 제시한다. 차량 간 거리‑속도 관계를 구간별 선형 함수로 근사하고, 이산시간 동역학을 마코프 체인의 확률적 최적제어 문제의 동적계획 방정식(DPE)으로 해석한다. 비팽창성, 동차성, 연결성 조건을 이용해 시스템의 안정성을 증명하고, 고유값 문제를 통해 정적(steady‑state) 흐름과 기본 다이어그램을 구한다. 원형 도로와 …
저자: Nadir Farhi
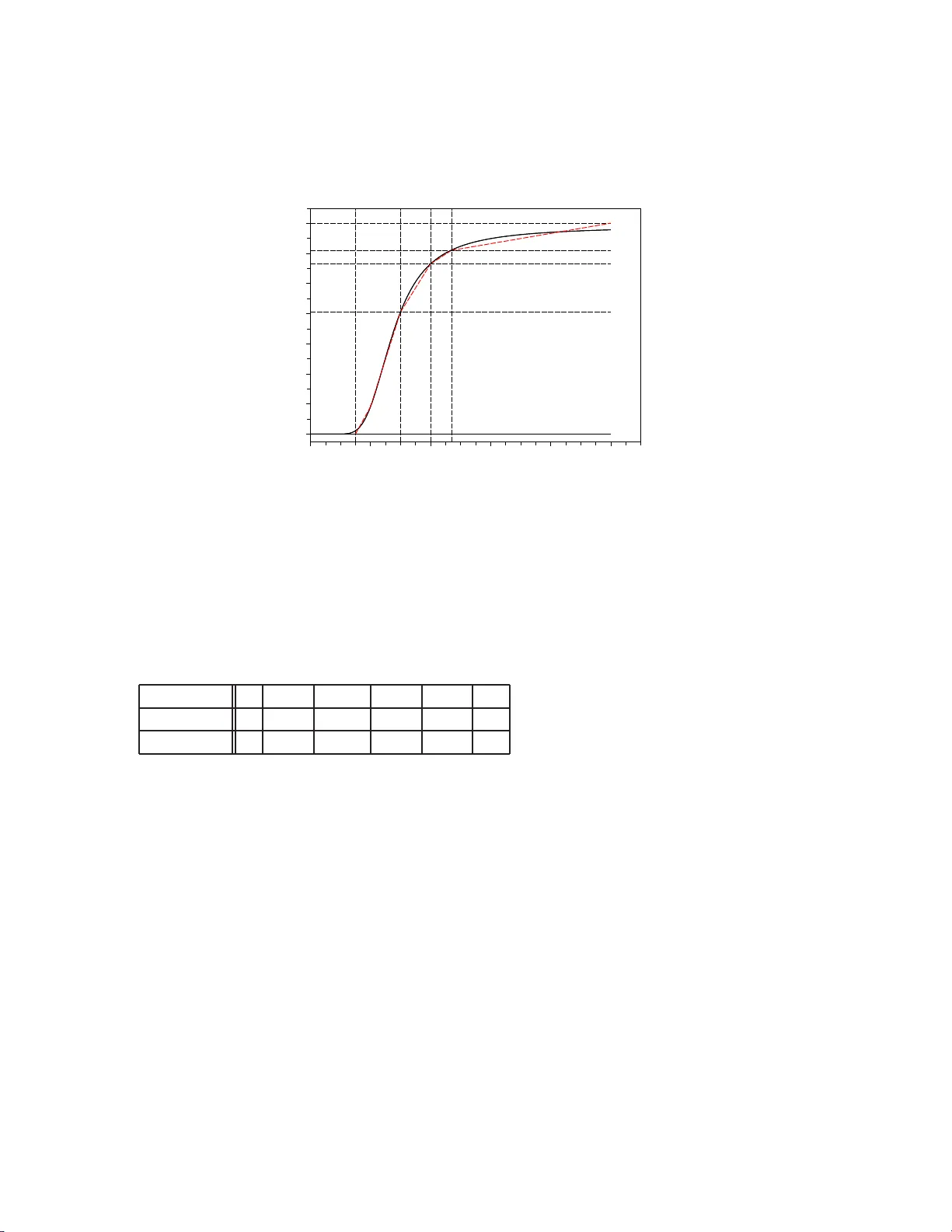
본 논문은 1차선 단일 차선 도로에서 차량이 추월 없이 움직이는 상황을 대상으로, 기존의 선형 차량추종 모델과 min‑plus 모델을 일반화한 ‘구간별 선형 차량추종 모델’을 제안한다. 모델의 핵심 아이디어는 차량 간 거리‑속도 관계를 나타내는 기본 다이어그램 Vₑ(y)를 구간별 선형 함수로 근사하는 것이다. 구체적으로 Vₑ(y)=min_{u∈U} max_{w∈W}{α_{uw} y+β_{uw}} 로 정의함으로써, 각 구간마다 서로 다른 기울기 α와 절편 β를 부여한다. 이 근사는 실제 교통에서 관측되는 비선형(예: tanh, 로그, 지수) 형태의 다이어그램을 여러 직선 구간으로 나누어 근사함으로써, 모델이 다양한 교통 상황을 포괄하도록 만든다.
이러한 Vₑ를 이용해 차량의 이산시간 동역학을 다음과 같이 기술한다.
xₙ(t+1)=xₙ(t)+min_{u∈U}{α_u·
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기