방향에 따른 GFP 기계적 펼침과 힘 센서
초록
이 논문은 이징‑유사 모델을 이용해 녹색형광단백질(GFP)의 기계적 전단을 다양한 당김 방향에서 조사한다. 단백질 양끝을 잡아당겼을 때 실험에서 보고된 주요·보조 전단 경로를 재현하고, 당김 방향을 바꾸면 전단력의 크기와 순서가 실험과 일치함을 확인한다. 이러한 방향 의존성을 활용해, 전단력에 따라 발광이 변하는 GFP 기반 힘 센서를 제안한다.
상세 분석
본 연구는 기존의 복잡한 원자 수준 시뮬레이션 대신, 이징‑유사 “네이티브‑센트릭” 모델을 채택하여 GFP의 구조적 변화를 이진 변수(m_k, σ_ij)로 단순화하였다. m_k는 각 잔기가 네이티브 상태인지 비네이티브 상태인지를 나타내고, σ_ij는 네이티브 스트레치의 방향(힘과 평행·반평행)을 기술한다. 이 모델은 잔기 간 접촉 에너지 h_ij와 외부 힘에 대한 포텐셜 U(L)으로 구성된 해밀토니안을 갖는다. 상수 힘 조건에서는 정확한 평형 해를 구할 수 있어 자유에너지 곡선 ΔG(L)을 직접 계산했으며, 이는 L≈11 nm, 18 nm, 25 nm에서 국소 최소를 보이며 실험적으로 관찰된 중간 상태와 일치한다.
동적 시뮬레이션은 Monte Carlo 방법으로 수행했으며, AFM과 유사한 일정 속도(v) 풀링을 구현하였다. 속도 0.3–3.6 µm/s에서 주요 전단 경로(α‑헬릭스 → β1 → β2/β3)와 보조 경로(α‑헬릭스 → β11)가 각각 70 %와 30 % 비율로 재현되었다. 주요 경로에서는 β1이 풀린 뒤 β2·β3가 동시에 풀리며, 이어 β10·β11이 차례로 전단된다. 각 전단 단계는 자유에너지 곡선의 국소 최소와 일치하는 L 구간(10–12 nm, 20 nm, 30–37 nm)에서 관찰된다. 보조 경로는 β11이 먼저 풀리는 특성을 보이며, 이는 실험에서 보고된 “바렐 플래트닝” 이후의 추가 전단 단계와 유사하다.
당김 방향을 바꾸어 3‑212, 132‑212 등 다양한 잔기 쌍을 고정점으로 선택했을 때, 전단력 f_M은 실험과 동일한 순서를 유지한다. 모델이 3‑D 구조를 완전히 반영하지 못함에도 불구하고, 전단력의 절대값은 실험보다 약 2‑3배 크게 예측되었으며, 이는 에너지 장벽이 과대평가된 결과로 해석된다. 또한 Evans‑Ritchie 이론을 이용해 전단력-속도 관계를 분석한 결과, 잠재적 폭 x_u 값이 일부 경우에만 실험과 일치했으며, 이는 모델의 차원 축소와 이론적 가정(힘 증가율 일정)의 한계 때문으로 보인다.
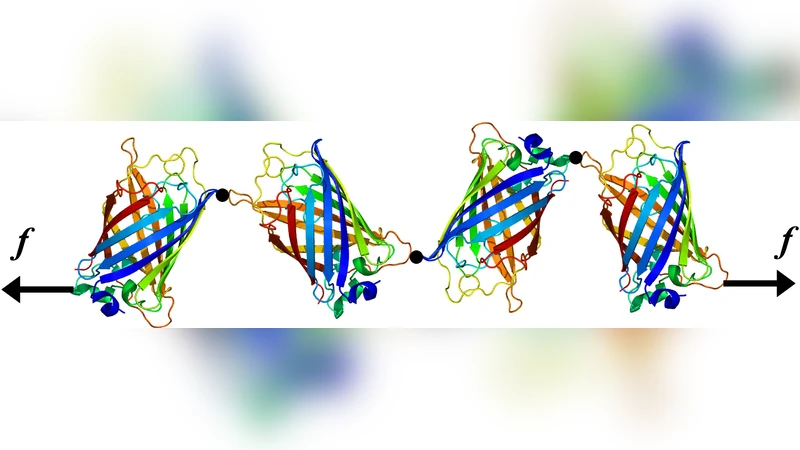
핵심적인 통찰은 GFP가 당김 방향에 따라 전단 강도가 크게 변한다는 점이다. 이를 이용해, 여러 GFP 모듈을 서로 다른 방향으로 연결한 다중‑모듈 단백질을 설계하면, 각 모듈이 특정 전단력 구간에서 발광을 잃거나 유지하게 된다. 따라서 전체 분자는 “힘‑센서” 역할을 수행하며, 발광 강도와 파장을 통해 적용된 힘의 크기를 정량적으로 추정할 수 있다. 이 아이디어는 기존 GFP가 “힘이 가해지면 비발광”이라는 단순 이진 응답만을 제공하던 한계를 극복하고, 연속적인 힘 측정이 가능한 분자 센서 플랫폼을 제시한다는 점에서 혁신적이다.
댓글 및 학술 토론
Loading comments...
의견 남기기