광학 흐름·디지털 지형지도 기반 비전 내비게이션 오류 분석
본 논문은 이동 카메라와 디지털 지형지도(DTM)를 이용한 CDTM 알고리즘의 오류원을 체계적으로 모델링하고, 각 오류가 카메라 자세·운동 추정에 미치는 영향을 폐쇄형 수식으로 도출한다. 카메라 해상도, 지형 구조·DTM 정확도, 시야각, 그리고 카메라 궤적 변화를 주요 변수로 삼아 사전 정확도 예측이 가능하도록 한다.
저자: Oleg Kupervasser, Ronen Lerner, Ehud Rivlin
본 논문은 이동 중인 카메라와 디지털 지형지도(DTM)를 결합한 비전 기반 내비게이션 알고리즘인 CDTM(Feature Correspondence + DTM)의 오류 분석을 수행한다. 기존의 비전 내비게이션은 주로 두 가지 접근법—랜드마크 기반과 에고모션 통합—을 사용한다. 랜드마크 방식은 2‑D 이미지 특징을 3‑D 세계 좌표와 매칭해 자세를 추정하지만, 특징 검출·매칭의 어려움이 있다. 에고모션 방식은 광학 흐름이나 관성 센서를 이용해 자체 움직임을 추정하지만, 시간에 따라 누적되는 드리프트가 큰 단점이다. CDTM은 이러한 두 접근법의 장점을 결합해, 에고모션 추정에 DTM 정보를 직접 활용함으로써 드리프트를 보정한다.
알고리즘의 핵심은 두 연속 프레임 사이의 광학 흐름을 이용해 각 특징점이 DTM 상의 어느 고도 평면에 위치하는지를 추정하고, 이를 통해 카메라의 절대 위치와 자세, 그리고 두 프레임 사이의 상대 이동을 동시에 계산한다. 이 과정에서 특징점과 DTM 평면 사이의 교차점 G_E를 구하고, 실제 지형점 G와의 차이를 선형화하여 작은 오차 범위 내에서 근사한다.
논문은 먼저 오류원을 네 가지 주요 요인으로 구분한다.
1) **카메라 해상도** – 픽셀 단위 위치 오차 σ_I 가 광학 흐름 측정에 직접 영향을 미친다.
2) **지형 구조·DTM 정확도** – 지형의 기하학적 변동성(경사, 고도 변화)과 DTM의 고도 오차 σ_h 가 G_E 추정에 영향을 준다.
3) **시야각(FOV)** – 넓은 시야는 다양한 기하학적 구성을 제공해 GDOP를 낮추고, Jacobian 행렬의 조건수를 개선한다.
4) **카메라 궤적** – 두 프레임 사이의 변위와 회전이 충분히 커야 선형화 가정이 타당하고, 신호대잡음비가 높아진다.
각 오류는 확률적 모델(가우시안 잡음)로 수식화된다. 데이터 벡터 D는 모든 q₂(두 번째 프레임의 이미지 좌표)와 G_E(추정된 지형점)들을 포함하고, 공분산 Σ_D는 이미지 측정 오차와 DTM 고도 오차를 블록 대각 행렬 형태로 결합한다.
수학적 전개는 비용 함수 F(θ,D)=0 을 정의하고, 12개의 파라미터 θ(위치 p, 자세 R, 상대 이동 Δp, ΔR)를 추정한다. Jacobian 행렬 J_θ (3n×12)와 J_D (3n×m)는 각각 파라미터와 데이터에 대한 편미분으로 구성된다. 1차 근사에 의해 파라미터 공분산 Σ_θ는
Σ_θ = (J_θᵀJ_θ)⁻¹ J_θᵀ Σ_F J_θ (J_θᵀJ_θ)⁻¹
여기서 Σ_F = J_D Σ_D J_Dᵀ 로 정의된다. 이 식은 각 오류원이 파라미터 추정에 어떻게 전파되는지를 명시적으로 보여준다.
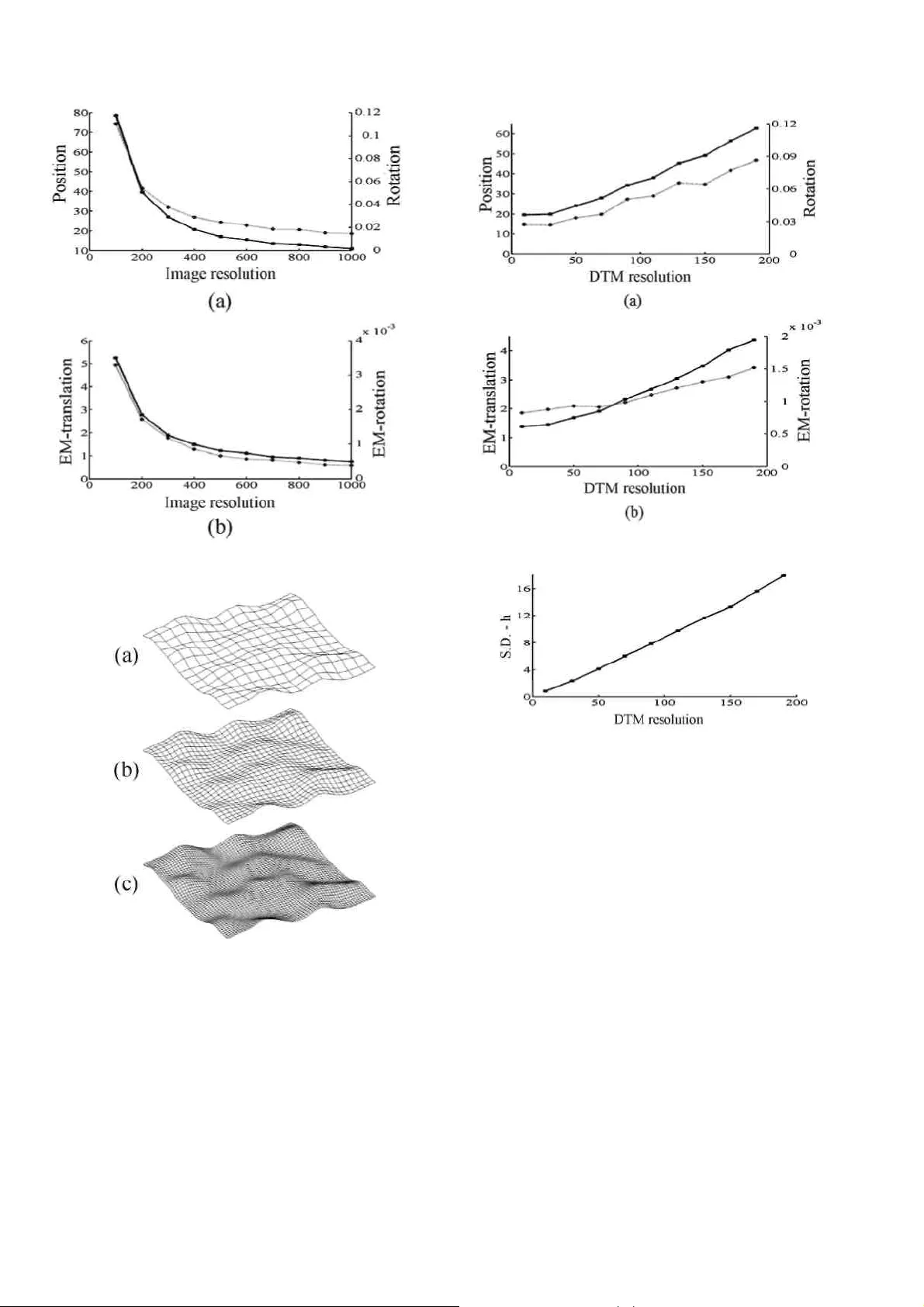
시뮬레이션에서는 다양한 시나리오(해상도 변화, FOV 축소, 평탄 지형, DTM 노이즈 증가 등)를 테스트하였다. 결과는 다음과 같다.
- 카메라 해상도가 낮을수록 σ_I 가 커져 자세·위치 오차가 선형적으로 증가한다.
- DTM 고도 오차 σ_h 가 커지면 G_E 추정이 불안정해져 전체 공분산이 급격히 확대된다.
- 시야각이 30° 이하로 감소하면 Jacobian의 랭크가 2 이하로 떨어져 해가 존재하지 않거나 수렴이 실패한다. 이는 평탄 지형에서도 동일하게 나타난다.
- 카메라 이동이 작아(Δp·ΔR이 작음) 경우, 광학 흐름의 신호가 약해져 J_θ의 조건수가 악화되고, 결과적으로 추정 오차가 크게 늘어난다.
또한, 두 번째 카메라 프레임(C₂)의 자세와 위치 공분산 Σ_C2 를 Σ_θ 에서 Jacobian J_C2 로 변환함으로써, 실제 내비게이션 시스템에서 Kalman 필터와 연계할 수 있는 측정 공분산 R_k 를 제공한다.
결론적으로, 논문은 CDTM 알고리즘이 “충분히 변동성이 있는 지형”, “넓은 시야”, “적절한 해상도와 충분한 프레임 간 변위” 조건 하에서 안정적으로 동작함을 증명한다. 또한, 제시된 폐쇄형 오류 전파 식은 설계 단계에서 카메라·DTM 파라미터를 최적화하고, 실시간 시스템에서 사전 정확도 예측을 가능하게 한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기