다중모드 로컬 센싱·통신으로 구현하는 협동형 수중 로봇 군집
초록
본 논문은 수중 자율 로봇(AUV) 군집이 로컬 수준에서 효율적으로 협동하도록, 광학(청색·적외선)과 전기장, 초음파·무선 등 다양한 전파 매체를 결합한 다중모드 센싱·통신 시스템을 설계·실험한다. 각 매체의 전파 특성·범위·에너지 요구를 비교하고, AquaJelly 플랫폼을 중심으로 양방향 디지털·아날로그 채널을 활용한 충돌 회피·도킹·거리 측정 등을 구현한다. 실험 결과는 짧은 거리에서는 전기장·IR이, 중·장거리에서는 청색광이 가장 효율적이며, 다중모드 조합이 로봇 간 협동을 크게 향상시킴을 보여준다.
상세 분석
이 논문은 수중 로봇 군집이 전통적인 장거리 음향·전파 방식에 의존하지 않고, 로컬 상호작용을 기반으로 자율성을 확보하기 위한 ‘다중모드(local‑modal)’ 접근법을 제시한다. 먼저, 표 Ⅰ에 정리된 네 가지 전파 매체(음파, 라디오, 광학, 전기장)의 전파 감쇠, 안테나·LED 크기, 최대 통신 거리 등을 정량적으로 비교한다. 특히, 물속에서 전파 감쇠가 급격히 증가하는 고주파 라디오는 2.5 m 이하의 제한된 범위만을 제공하므로, 로봇 간 근거리 협동에는 부적합함을 지적한다. 반면, 청색광(460 nm)은 1 dB/m 수준의 낮은 감쇠로 1 ~ 1.2 m 정도의 실용적 범위를 확보하고, 적외선(800 nm)은 10 dB/m 감쇠로 0.25 m 정도의 짧은 범위에서 고속 디지털 전송(4 kbps)과 정확한 방향 감지를 가능하게 한다. 전기장은 100 dB/m라는 높은 감쇠에도 불구하고 0.1 m 크기의 전극으로 1 m 이하의 거리에서 전압 변조를 통한 아날로그 신호 교환이 가능하며, 전기장 벡터를 이용한 방위·거리 추정 알고리즘을 제시한다.
AquaJelly 플랫폼은 11개의 IR 송·수신기와 6개의 청색 LED를 원형 링에 배치해, ‘아날로그 청색광‑디지털 IR’ 이중 채널을 구현한다. IR은 0.5 m 이내에서 PCM 변조(4 kbps)로 로봇 ID와 짧은 명령을 교환하고, 청색광은 1 ~ 1.3 m 범위에서 전역적인 광학 페로몬(gradient) 신호를 제공해 로봇 간 거리·방향 정보를 연속적으로 획득한다. 실험에서는 95 % 청취·5 % 전송 비율의 TDMA 방식을 적용해 충돌 회피와 도킹 행동을 성공적으로 시연하였다.
청색광 단일 모드 구현을 위한 추가 연구에서는 QAM 변조가 119 kbps 대역에서 120 cm까지 통신 거리와 7 ~ 12 cm의 거리 측정 정확도를 동시에 제공함을 확인했다. 프로그래머블 증폭기와 감도 조절을 통해 ‘활성 센싱’ 알고리즘을 적용하면, 전송 전력을 단계적으로 감소시키며 상대 로봇까지의 거리를 추정할 수 있다.
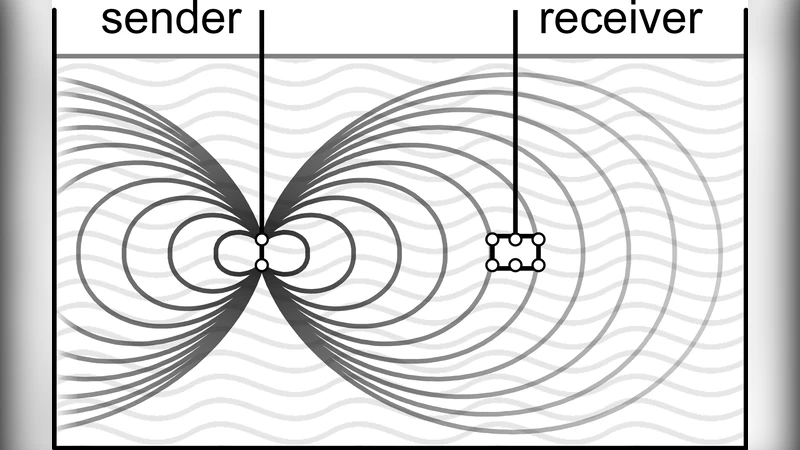
전기장 기반 시스템은 전기 어류의 전기 감지 메커니즘을 모방해, 전극 쌍을 이용한 전압 차 검출로 방향·거리 정보를 복원한다. 수식 (6)–(8)에 따라 4개의 전극에서 측정된 전압 비율을 이용해 거리 r과 방위 α를 계산한다. 실험 결과, 전기장은 0.5 m 이내에서 안정적인 신호를 제공했으며, 물리적 방해물(예: 금속 구조물)에도 비교적 강인한 특성을 보였다. 다만 전극의 수평·수직 정렬 요구와 3차원 환경에서의 오차 문제는 추가적인 하드웨어 설계와 보정 알고리즘이 필요함을 언급한다.
전체적으로 논문은 ‘다중모드 로컬 S&C’가 단일 매체 기반 시스템보다 로봇 군집의 협동성, 에너지 효율성, 환경 적응성을 크게 향상시킨다는 결론을 도출한다. 특히, 짧은 거리에서는 전기장·IR, 중·장거리에서는 청색광을 활용하고, 필요 시 음향·라디오를 보조 채널로 두는 하이브리드 구조가 실용적이다. 이러한 설계 원칙은 향후 대규모 수중 스웜 로봇 시스템의 표준 아키텍처로 채택될 가능성을 시사한다.
댓글 및 학술 토론
Loading comments...
의견 남기기