무작위 필드 정찰을 위한 빠른 정보 획득 의사결정
초록
본 논문은 미지의 랜덤 스칼라 필드에서 중요한 위상(임계점·임계레벨 집합)을 신속히 파악하기 위한 정보‑이론 기반 탐색 프레임워크를 제시한다. 차등 위상학과 엔트로피 개념을 결합해 “보수적”·“공격적” 탐색 전략을 정량화하고, 경사 상승·하강 움직임과 등고선(등위선) 추적이라는 두 종류의 로봇 제어 원리를 교대로 적용하는 의사결정 규칙을 설계한다. Monte‑Carlo 시뮬레이션과 인간‑인‑루프 게임 실험을 통해 제안된 전략들의 효율성을 검증한다.
상세 분석
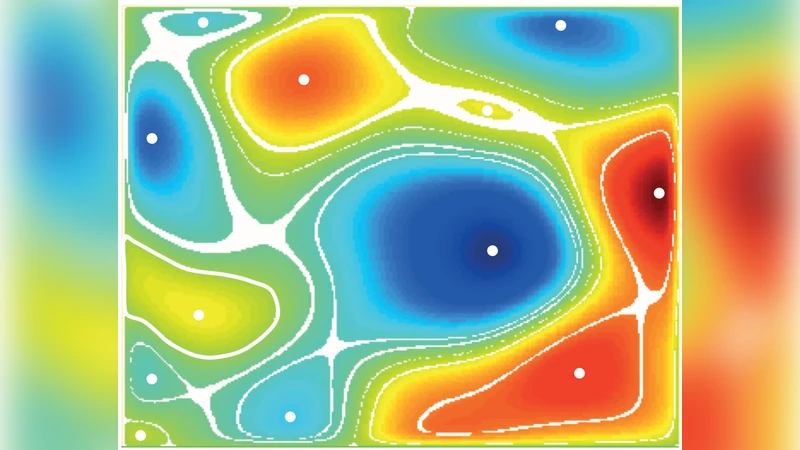
이 논문은 무작위 스칼라 필드의 위상 정보를 효율적으로 획득하기 위해 정보 이론과 미분 위상학을 융합한 새로운 탐색 이론을 구축한다. 먼저, 필드를 Morse 함수로 가정하고, 임계값에 따라 연결 성분이 변하는 과정을 통해 “위상 유도 분할(topology‑induced partition, M)”을 정의한다. 이 분할은 임계 레벨 집합(극값·안장점에 해당하는 등고선)과 그 사이의 안쪽 영역(annulus)으로 구성되며, 각 셀의 Euler 특성 χ를 통해 셀의 위상적 복잡도를 정량화한다.
다음으로, 필드 데이터를 수집하는 로봇의 움직임을 두 가지 원시 동작으로 모델링한다. (a) gradient‑ascent/descent는 필드의 기울기를 따라 이동해 극값을 탐색하고, (b) isoline‑mapping은 현재 알려진 등고선을 따라 이동해 새로운 등고선을 측정한다. 이 두 동작을 교대로 적용함으로써 “탐색(exploration)”과 “활용(exploitation)” 사이의 트레이드오프를 구현한다.
핵심은 “데이터 유도 분할(data‑induced partition, V_k)”의 엔트로피 H(V_k)를 정의하고, 새로운 등고선이 추가될 때 엔트로피 증가율 ΔH를 측정하는 것이다. 특히, 셀의 Euler 특성이 χ≤‑1인 경우에만 새로운 등고선이 위상 유도 분할에 정보를 제공한다는 정리를 이용해, 등고선 매핑이 위상 정보를 얼마나 효율적으로 늘리는지를 정량화한다.
이 정보를 바탕으로 논문은 두 가지 전략을 제시한다. “공격적(aggressive)” 전략은 초기 단계에서 가능한 한 많은 극값을 찾는 데 집중해 탐색 비용을 크게 늘리지만, 이후 위상 정보가 급격히 증가한다. 반면 “보수적(conservative)” 전략은 이미 발견된 극값을 활용해 등고선을 체계적으로 매핑함으로써 엔트로피 증가율을 안정적으로 유지한다. 두 전략 사이의 전환은 “정보 그래디언트”와 유사한 기준—즉, 현재 ΔH가 사전에 설정된 임계값 이하로 떨어지면 탐색에서 활용으로, 반대이면 활용에서 탐색으로 전환—에 의해 자동으로 결정된다.
Monte‑Carlo 시뮬레이션 결과는 공격적 전략이 초기 위상 정보 획득 속도가 빠르지만 전체 매핑 비용이 높으며, 보수적 전략은 전체 비용이 낮고 일관된 성능을 보인다는 것을 보여준다. 또한, 인간 피험자를 대상으로 설계된 컴퓨터 게임 실험에서는 피험자들이 자연스럽게 위상 정보에 대한 편향(bias)을 보이며, 위상 편향이 큰 피험자일수록 적은 수의 등고선으로도 높은 정보 효율을 달성하는 것으로 나타났다. 이는 인간이 직관적으로 “위상 중심” 탐색을 선호한다는 가설을 뒷받침한다.
전반적으로 이 연구는 (1) 위상 유도 분할과 엔트로피 기반 정보 메트릭을 통한 정량적 탐색 설계, (2) 두 종류의 로봇 제어 원리를 결합한 계층적 의사결정 프레임워크, (3) 인간‑인‑루프 실험을 통한 전략 검증이라는 세 축으로 로봇 정찰 분야에 새로운 이론적·실험적 기반을 제공한다.
댓글 및 학술 토론
Loading comments...
의견 남기기